netty socket 今天,小白的老师让小白写一个服务器,小白学艺不精,过来向大头求救了。
那么socket究竟是什么呢?套接字接口(socket interface)是一组函数,它们和Unix I /O函数结合起来,用以创建网络应用。从Linux内核的角度来看, 一个套接字就是通信的一个端点。从Linux程序的角度来看,套接字就是一个有相应描述符的打开文件。
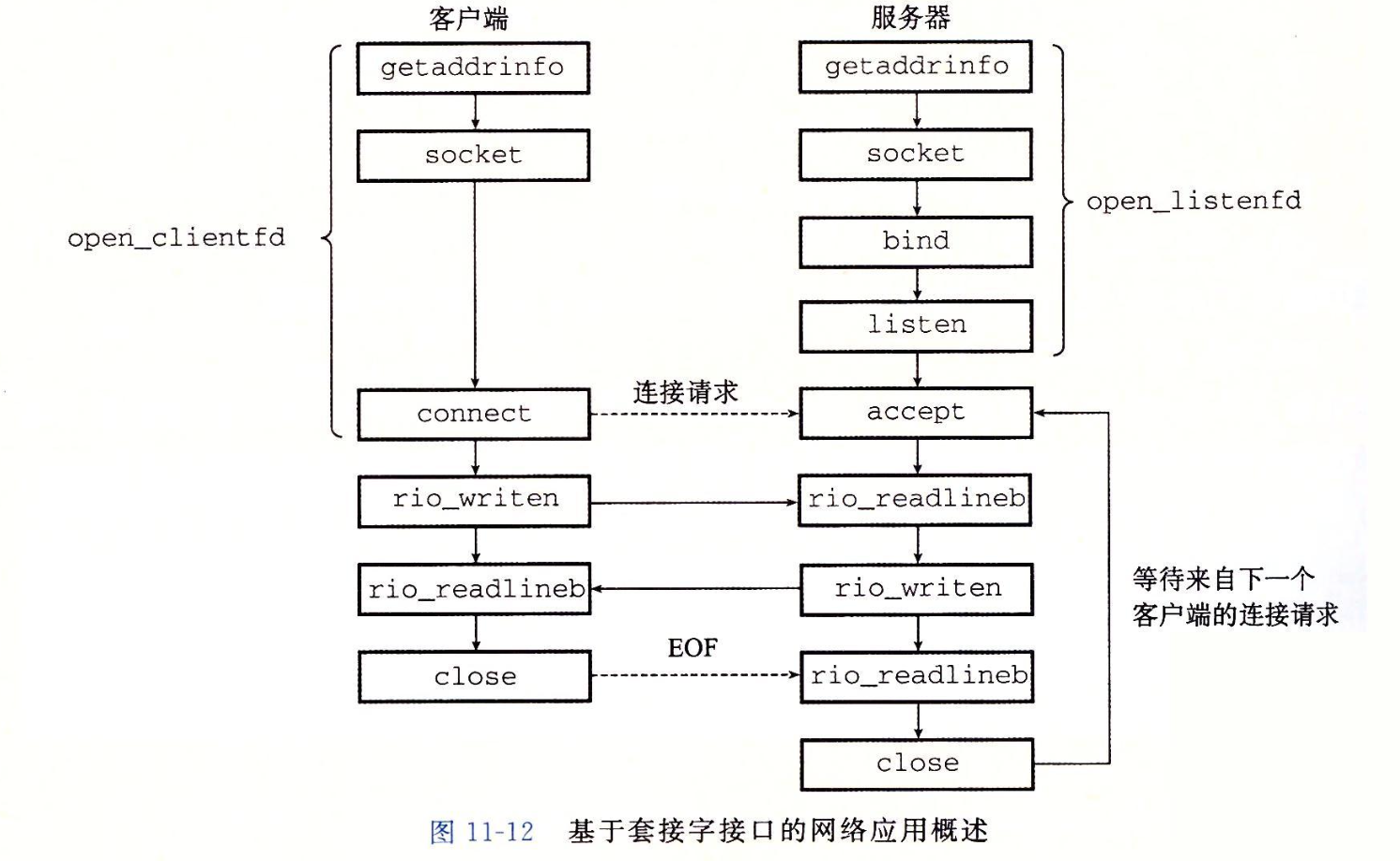
下图来源于CSAPP的书。
这张图清晰的表明了socket是个啥,从逻辑上说,这玩意就是个接口,从这个接口能发送和接收数据,从物理上说,这玩意就是个文件,发送数据就是往这个文件里面写入数据,接收数据就是从这个文件里面读取数据。所以Socket也是个IO操作。只不过这个文件的数据不存储在你电脑的硬盘里面,而是通过网络发送出去了。
通过socket函数可以打开一个文件,返回一个文件描述符。文件描述符可以简单的理解为文件的ID,唯一标识,一般默认打开的3个文件描述符就是标准输入,标准输出,错误输出,对应0、1、2.假设我们打开了一个socket文件,描述符是3.
接下来通过服务器通过bind函数,可以将这个socket文件,和一个IP还有端口号进行绑定。绑定以后写入这个文件的数据就会从这个IP端口读取出来或者发送出去。
socket分为客户端和服务器,客户端主动发起请求,服务器被动接受请求,listen函数就是告诉Linux内核,我这个socket是一个服务器,而不是一个客户端。
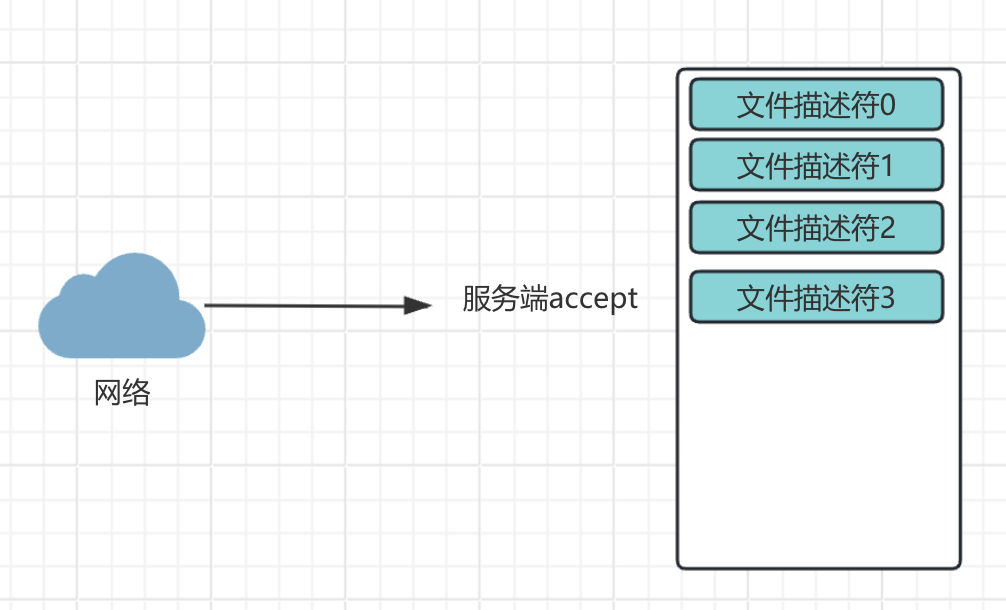
最后通过accept函数,来等待客户端的连接.accept函数会返回一个新的文件描述符,通过这个新的文件进行传递数据,而老的文件仅仅负责建立连接。
下图为accept的时候服务器的状态,这个时候等待连接。
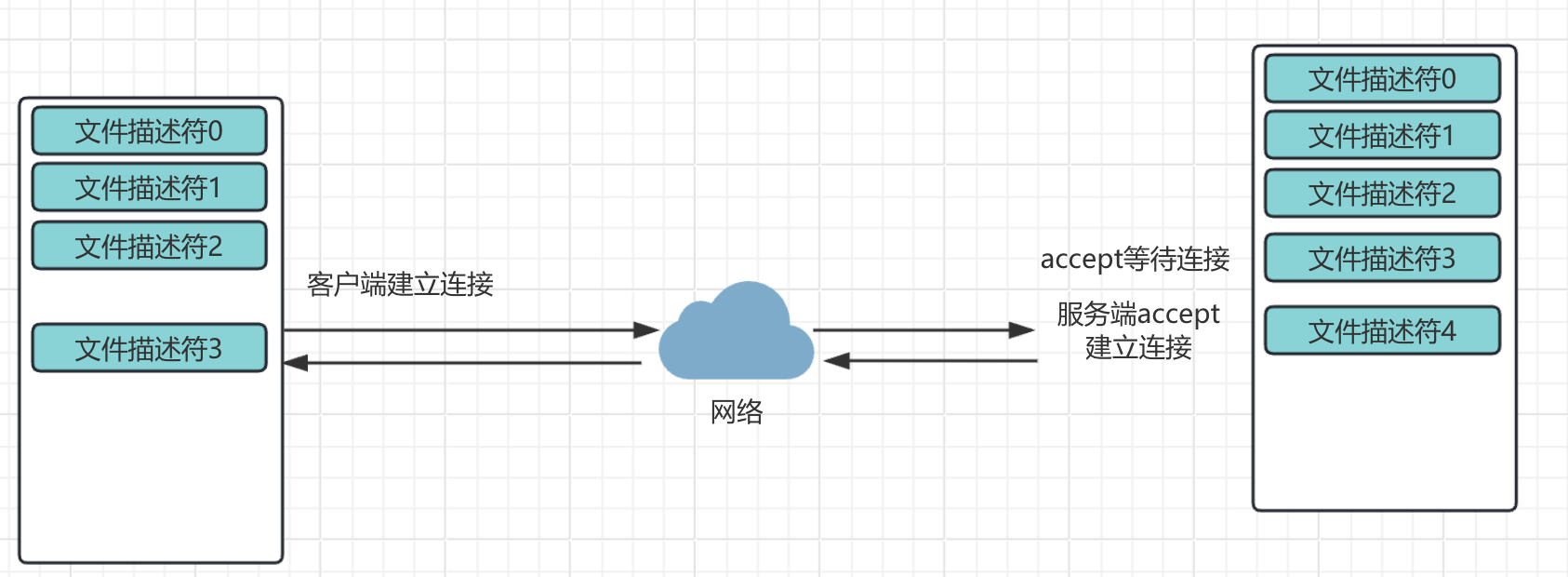
当连接建立以后,会通过新的文件描述符4进行通信。
基于上述理论知识,学过哲学的都知道,实践是检验真理的唯一标准。所以小白用java实现了第一版socket服务器。端口号是8888,祝看到这里的兄弟们发发发发。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 import java.io.*;import java.net.ServerSocket;import java.net.Socket;public class SocketServer { private static final String FILE_PATH = "HelloWorld.java" ; private static String readFileAsString (String filePath) throws IOException { StringBuilder contentBuilder = new StringBuilder (); try (BufferedReader br = new BufferedReader (new FileReader (filePath))) { String currentLine; while ((currentLine = br.readLine()) != null ) { System.out.println(currentLine); contentBuilder.append(currentLine).append("\n" ); } } return contentBuilder.toString(); } public static void main (String[] args) { int port = 8888 ; try { ServerSocket serverSocket = new ServerSocket (port); System.out.println("Server is running and listening on port " + port); while (true ) { Socket clientSocket = serverSocket.accept(); System.out.println("Client connected." ); try { BufferedReader in = new BufferedReader (new InputStreamReader (clientSocket.getInputStream())); String inputLine; StringBuilder request = new StringBuilder (); while ((inputLine = in.readLine()) != null && !inputLine.isEmpty()) { request.append(inputLine).append("\n" ); } PrintWriter out = new PrintWriter (clientSocket.getOutputStream(), true ); String fileContent = readFileAsString(FILE_PATH); long contentLength = fileContent.getBytes().length; String response = "HTTP/1.1 200 OK\r\n" + "Content-Type: application/json\r\n" + "Content-Length: " + contentLength + "\r\n" + "Connection: close\r\n" + "\r\n" + fileContent; out.println(response); clientSocket.close(); } catch (IOException e) { e.printStackTrace(); } System.out.println("Client says: hello world!" ); clientSocket.close(); } } catch (IOException e) { e.printStackTrace(); } } }
这个代码里面没有bind和listen。这是因为被java封装起来了。如果看看ServerSocket里面的代码就能看见这两个函数。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 public ServerSocket (int port) throws IOException { this (port, 50 , null ); } public ServerSocket (int port, int backlog, InetAddress bindAddr) throws IOException { if (port < 0 || port > 0xFFFF ) throw new IllegalArgumentException ("Port value out of range: " + port); if (backlog < 1 ) backlog = 50 ; this .impl = createImpl(); try { bind(new InetSocketAddress (bindAddr, port), backlog); } catch (IOException | SecurityException e) { close(); throw e; } }
上面能看到调用了bind方法。再看看bind里面呢。能看到这个里面有getImpl().bind和getImpl().listen。这就是上面说的bind和listen函数了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 public void bind (SocketAddress endpoint, int backlog) throws IOException { if (isClosed()) throw new SocketException ("Socket is closed" ); if (isBound()) throw new SocketException ("Already bound" ); if (endpoint == null ) endpoint = new InetSocketAddress (0 ); if (!(endpoint instanceof InetSocketAddress epoint)) throw new IllegalArgumentException ("Unsupported address type" ); if (epoint.isUnresolved()) throw new SocketException ("Unresolved address" ); if (backlog < 1 ) backlog = 50 ; @SuppressWarnings("removal") SecurityManager security = System.getSecurityManager(); if (security != null ) security.checkListen(epoint.getPort()); synchronized (stateLock) { if (closed) throw new SocketException ("Socket is closed" ); if (bound) throw new SocketException ("Already bound" ); getImpl().bind(epoint.getAddress(), epoint.getPort()); getImpl().listen(backlog); bound = true ; } }
让我们用wrk压测一下。可以发现很垃圾。仅仅处理了4个请求,虽然响应时间很快。可是吞吐量太低了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 10000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 55.33ms 326.77us 55.72ms 50.00% Req/Sec 40.00 0.00 40.00 100.00% Latency Distribution 50% 55.44ms 75% 55.72ms 90% 55.72ms 99% 55.72ms 4 requests in 30.10s, 852.00B read Socket errors: connect 7967, read 196512, write 14, timeout 0 Requests/sec: 0.13 Transfer/sec: 28.30B
接下来,上线程池,小白实现了第二版代码。这次的代码加入了线程池,所有的客户端请求建立以后通过线程池的线程进行处理。建立10个线程。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 import java.io.*;import java.net.*;import java.util.concurrent.ExecutorService;import java.util.concurrent.Executors;public class SimpleHttpServer { private static final int PORT = 8888 ; private static final String FILE_PATH = "HelloWorld.java" ; public static void main (String[] args) { ExecutorService threadPool = Executors.newFixedThreadPool(10 ); try (ServerSocket serverSocket = new ServerSocket (PORT)) { System.out.println("Server is running at http://localhost:" + PORT); while (true ) { Socket clientSocket = serverSocket.accept(); threadPool.execute(new ClientHandler (clientSocket)); } } catch (IOException e) { e.printStackTrace(); } } private static class ClientHandler implements Runnable { private final Socket clientSocket; public ClientHandler (Socket clientSocket) { this .clientSocket = clientSocket; } @Override public void run () { try { BufferedReader in = new BufferedReader (new InputStreamReader (clientSocket.getInputStream())); String inputLine; StringBuilder request = new StringBuilder (); while ((inputLine = in.readLine()) != null && !inputLine.isEmpty()) { request.append(inputLine).append("\n" ); } PrintWriter out = new PrintWriter (clientSocket.getOutputStream(), true ); String fileContent = readFileAsString(FILE_PATH); long contentLength = fileContent.getBytes().length; String response = "HTTP/1.1 200 OK\r\n" + "Content-Type: application/json\r\n" + "Content-Length: " + contentLength + "\r\n" + "Connection: close\r\n" + "\r\n" + fileContent; out.println(response); clientSocket.close(); } catch (IOException e) { e.printStackTrace(); } } private String readFileAsString (String filePath) throws IOException { StringBuilder contentBuilder = new StringBuilder (); try (BufferedReader br = new BufferedReader (new FileReader (filePath))) { String currentLine; while ((currentLine = br.readLine()) != null ) { System.out.println(currentLine); contentBuilder.append(currentLine).append("\n" ); } } return contentBuilder.toString(); } } }
接下来在看压测结果。同样30s,处理了13个请求,处理时间虽然略有上升,但是整体性能提升了很多。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 10000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 118.94ms 32.73ms 148.30ms 53.85% Req/Sec 17.50 21.62 60.00 83.33% Latency Distribution 50% 147.83ms 75% 148.02ms 90% 148.25ms 99% 148.30ms 13 requests in 30.10s, 2.70KB read Socket errors: connect 7967, read 198469, write 1, timeout 0 Requests/sec: 0.43 Transfer/sec: 91.99B
IO 在 Java 中,BIO、NIO 和 AIO 是三种不同的 I/O 模型,它们各自的工作原理和使用场景有所不同。下面简要说明这三种 I/O 模型:
BIO(Blocking I/O,阻塞 I/O) BIO就类似于你去胖东来,但是人太多了,要排队进去,而且你这个时候走了,那么你的位置就没了,需要重新排队,所以你不能离开,你只能排队等着!!!这就是所谓的同步阻塞。
原理:
特性:
阻塞:每次读写操作都会等待数据的到来或写入完成,阻塞当前线程。
线程绑定:每个客户端连接都会占用一个独立的线程。
简单直观:编程模型简单,适合小规模应用,但不适合高并发的场景。
优缺点:
优点:实现简单,编程模型直观。
缺点:性能差,尤其是在高并发场景下,线程过多导致资源浪费(线程上下文切换开销大)。
使用场景:
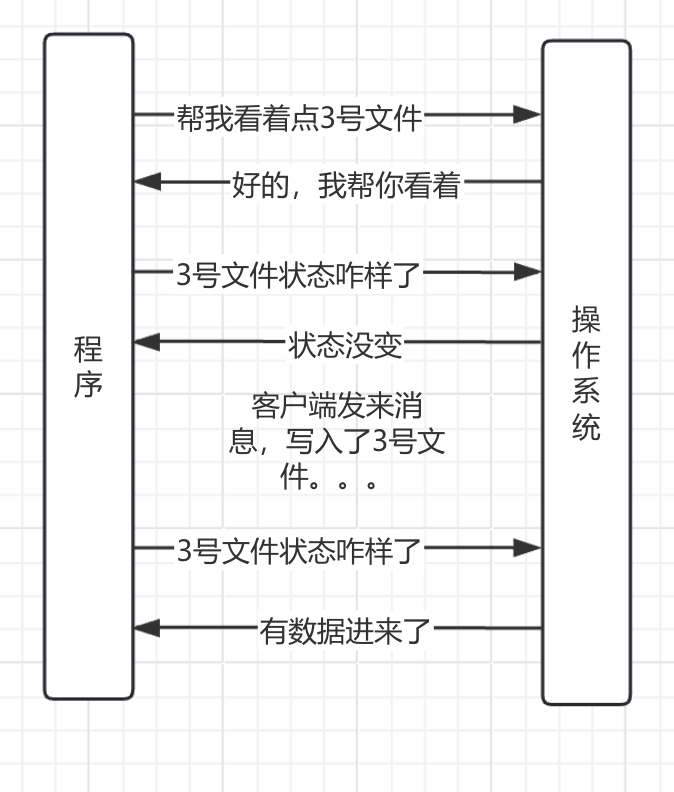
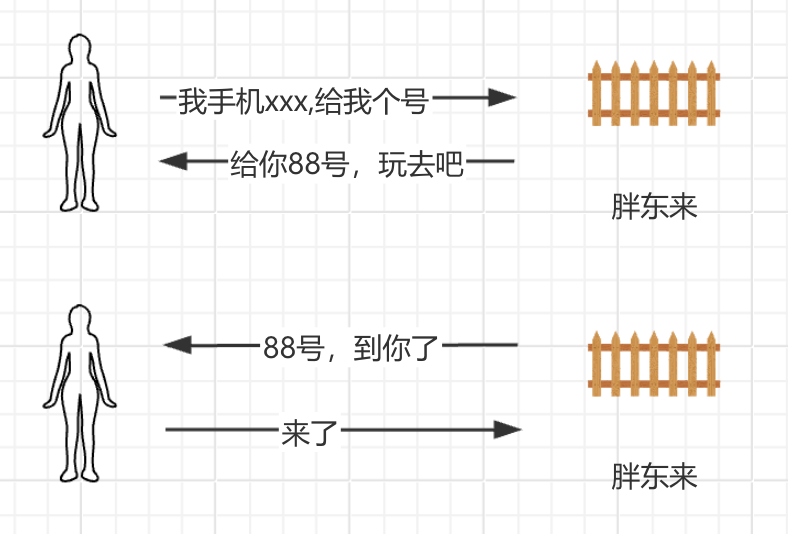
NIO(New I/O,新 I/O) NIO通过操作系统提供的IO多路复用机制,可以实现多线程的性能,因为IO多路复用,本质上是单线程的,所以省去了操作系统线程切换的开销。
拿胖东来说,BIO你只能等着,但如果你是NIO,那么胖东来说,我给你发个号吧,你是88号,接下来你爱干啥干啥去,等我叫88号了,你过来就行了。但是呢,我只负责叫号,你离远了听不见那是你的事,你的时不时的过来问我一下,到88号了吗?到了你就进去,没到你就等着。
从代码来说,就是通过select进行订阅。比如select订阅文件描述符3号的状态,操作系统如果发现有数据从网络中传输过来,那么就写入3号文件,写完以后,操作系统就改变3号文件的状态,这个时候select如果过来判断3号的状态,发现变了,就知道可以执行对应的操作了,比如服务器开始运行,然后读取文件内容发送给客户端。
原理:
特性:
非阻塞 I/O:可以通过轮询和事件通知的方式处理 I/O 请求,而不必阻塞等待。
多路复用:通过 Selector 实现一个线程管理多个 Channel,处理多个连接。
高效:减少了线程的开销,适用于高并发场景。
优缺点:
优点:比 BIO 更高效,适合高并发、高负载的应用。
缺点:编程模型较为复杂,需要理解 Selector、Channel、Buffer 的使用方式,开发成本较高。
使用场景:
AIO(Asynchronous I/O,异步 I/O) AIO就是说,在胖东来排队的时候,你找他要号的时候,还留了个手机号码,告诉他,到我了你就给我打电话,他给你88号,等叫到88号了,他就给你打电话说,到你了,过来吧。和NIO的区别就是你不用老过来问了,到了我打电话叫你。
原理:
特性:
异步:I/O 操作发起后,线程立即返回,不会等待操作完成。
事件驱动:操作完成后,系统通过回调通知应用程序处理结果。
无需轮询:不同于 NIO,AIO 不需要手动轮询 Selector,操作完成后直接通过回调处理结果。
优缺点:
优点:可以进一步减少线程和上下文切换,性能非常高,适合超高并发的应用。
缺点:复杂度最高,需要理解回调和事件处理机制,调试较为困难。
使用场景:
特性 BIO NIO AIO
阻塞方式 阻塞(每个操作阻塞当前线程)
非阻塞(通过轮询和事件驱动)
异步(操作完成后通过回调通知)
线程管理 每个连接一个线程
一个线程处理多个连接
一个线程发起请求,回调通知结果
编程复杂度 低
中
高
性能 性能差,适用于低并发场景
性能优越,适用于高并发场景
性能最优,适用于超高并发场景
适用场景 小规模服务,低并发应用
高并发应用,如 Web 服务器
极高并发应用,如大数据流处理
NIO实现 说了这么多,小白也实现了NIO版本的服务器。代码如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 import java.io.IOException;import java.nio.ByteBuffer;import java.nio.channels.*;import java.nio.file.*;import java.util.Iterator;import java.util.Set;public class NIOHttpServer { private static final int PORT = 8888 ; private static final String FILE_TO_SERVE = "HelloWorld.java" ; public static void main (String[] args) { try { Selector selector = Selector.open(); ServerSocketChannel serverSocketChannel = ServerSocketChannel.open(); serverSocketChannel.bind(new java .net.InetSocketAddress(PORT)); serverSocketChannel.configureBlocking(false ); serverSocketChannel.register(selector, SelectionKey.OP_ACCEPT); System.out.println("NIO HTTP Server started on port " + PORT); while (true ) { selector.select(); Set<SelectionKey> selectedKeys = selector.selectedKeys(); Iterator<SelectionKey> iterator = selectedKeys.iterator(); while (iterator.hasNext()) { SelectionKey key = iterator.next(); iterator.remove(); if (key.isAcceptable()) { handleAccept(key); } else if (key.isReadable()) { handleRead(key); } } } } catch (IOException e) { e.printStackTrace(); } } private static void handleAccept (SelectionKey key) throws IOException { ServerSocketChannel serverSocketChannel = (ServerSocketChannel) key.channel(); SocketChannel clientChannel = serverSocketChannel.accept(); clientChannel.configureBlocking(false ); clientChannel.register(key.selector(), SelectionKey.OP_READ); System.out.println("Accepted new connection from " + clientChannel.getRemoteAddress()); } private static void handleRead (SelectionKey key) throws IOException { SocketChannel clientChannel = (SocketChannel) key.channel(); ByteBuffer buffer = ByteBuffer.allocate(1024 ); int bytesRead = clientChannel.read(buffer); if (bytesRead == -1 ) { clientChannel.close(); return ; } buffer.flip(); byte [] requestData = new byte [buffer.remaining()]; buffer.get(requestData); String request = new String (requestData); System.out.println("Received request:\n" + request); String fileContent; try { fileContent = Files.readString(Paths.get(FILE_TO_SERVE)); System.out.println("Read file content:\n" + fileContent); } catch (IOException e) { fileContent = "Error reading file: " + e.getMessage(); System.err.println(fileContent); } String response = "HTTP/1.1 200 OK\r\n" + "Content-Type: application/json\r\n" + "Content-Length: " + fileContent.length() + "\r\n" + "\r\n" + fileContent; ByteBuffer responseBuffer = ByteBuffer.wrap(response.getBytes()); clientChannel.write(responseBuffer); clientChannel.close(); } }
在执行一下压测,结果表明处理了24个请求,吞吐量大大增加了。性能有明显提升,而且更加稳定。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 10000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 145.80ms 9.32ms 170.26ms 87.50% Req/Sec 14.88 8.95 30.00 62.50% Latency Distribution 50% 142.46ms 75% 142.72ms 90% 168.73ms 99% 170.26ms 24 requests in 30.09s, 4.52KB read Socket errors: connect 7967, read 192317, write 0, timeout 0 Requests/sec: 0.80 Transfer/sec: 153.92B
小白又把代码重新改了一遍。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 import java.io.IOException;import java.nio.ByteBuffer;import java.nio.channels.*;import java.nio.file.Files;import java.nio.file.Path;import java.nio.file.Paths;import java.util.Iterator;import java.util.Set;public class NIOHttpServer { private static final int PORT = 8888 ; private static final String FILE_PATH = "HelloWorld.java" ; public static void main (String[] args) { try { new NIOHttpServer ().start(); } catch (IOException e) { System.err.println("Server error: " + e.getMessage()); e.printStackTrace(); } } public void start () throws IOException { Selector selector = Selector.open(); ServerSocketChannel serverChannel = ServerSocketChannel.open(); serverChannel.bind(new java .net.InetSocketAddress(PORT)); serverChannel.configureBlocking(false ); serverChannel.register(selector, SelectionKey.OP_ACCEPT); System.out.println("Server started on port " + PORT); while (true ) { selector.select(); Set<SelectionKey> selectedKeys = selector.selectedKeys(); Iterator<SelectionKey> keyIterator = selectedKeys.iterator(); while (keyIterator.hasNext()) { SelectionKey key = keyIterator.next(); keyIterator.remove(); if (key.isAcceptable()) { handleAccept(key, selector); } else if (key.isReadable()) { handleRead(key); } } } } private void handleAccept (SelectionKey key, Selector selector) throws IOException { ServerSocketChannel serverChannel = (ServerSocketChannel) key.channel(); SocketChannel clientChannel = serverChannel.accept(); clientChannel.configureBlocking(false ); clientChannel.register(selector, SelectionKey.OP_READ); System.out.println("Accepted connection from " + clientChannel.getRemoteAddress()); } private void handleRead (SelectionKey key) { SocketChannel clientChannel = (SocketChannel) key.channel(); ByteBuffer buffer = ByteBuffer.allocate(1024 ); try { int bytesRead = clientChannel.read(buffer); if (bytesRead == -1 ) { clientChannel.close(); return ; } buffer.flip(); String request = new String (buffer.array(), 0 , buffer.limit()); System.out.println("Received request: \n" + request); String fileContent = readFileContent(FILE_PATH); String response = constructHttpResponse(fileContent); ByteBuffer responseBuffer = ByteBuffer.wrap(response.getBytes()); while (responseBuffer.hasRemaining()) { clientChannel.write(responseBuffer); } clientChannel.close(); } catch (IOException e) { System.err.println("Error handling client request: " + e.getMessage()); try { clientChannel.close(); } catch (IOException ex) { System.err.println("Error closing client connection: " + ex.getMessage()); } } } private String constructHttpResponse (String bodyContent) { String headers = constructHttpHeaders(bodyContent.length()); return headers + bodyContent; } private String constructHttpHeaders (int contentLength) { return "HTTP/1.1 200 OK\r\n" + "Content-Type: text/plain\r\n" + "Content-Length: " + contentLength + "\r\n" + "\r\n" ; } private String readFileContent (String filePath) { try { Path path = Paths.get(filePath); return Files.readString(path); } catch (IOException e) { System.err.println("Error reading file: " + e.getMessage()); return "File not found or error reading file." ; } } }
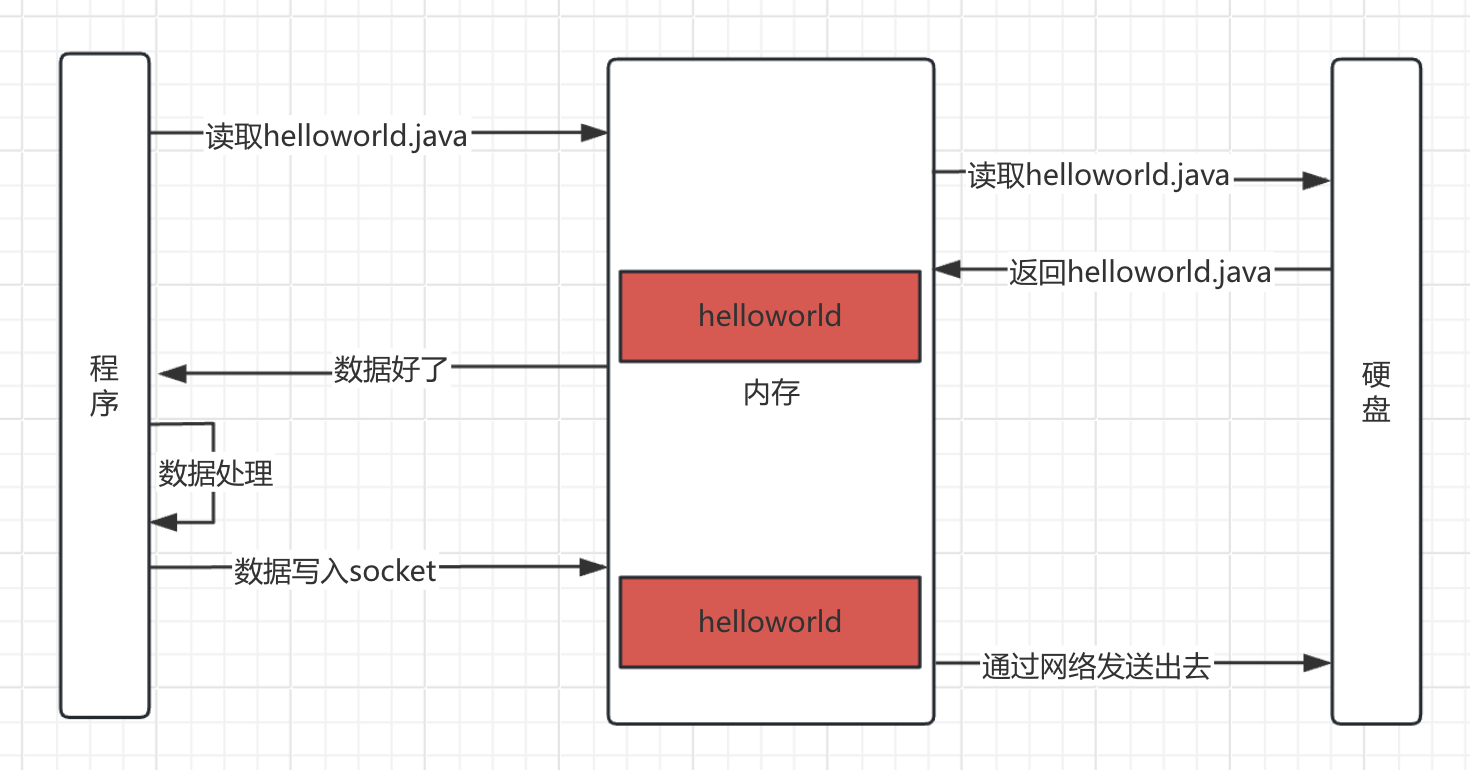
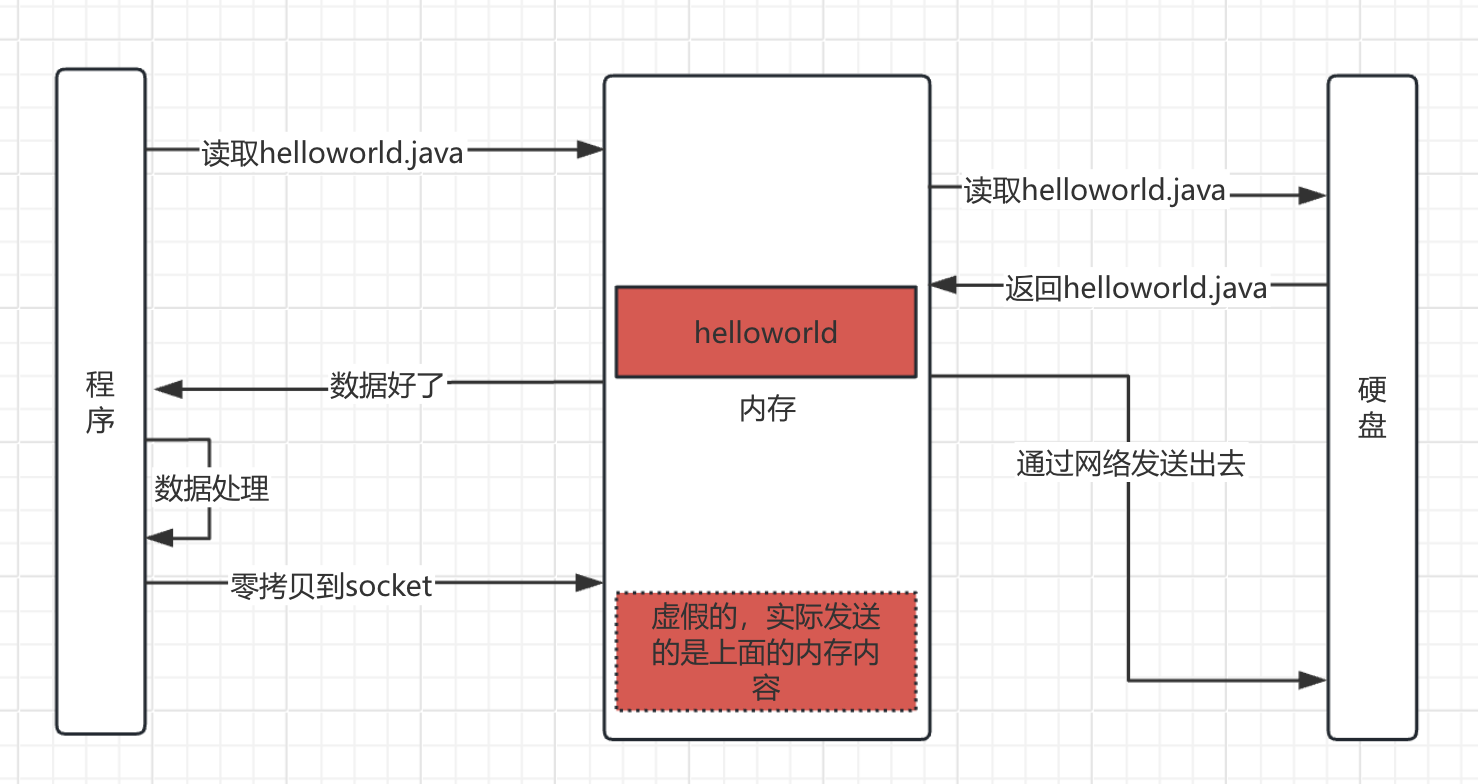
零拷贝技术 现在代码中读取文件内容在返回的过程如下图所示。可以看到一共有7步,有多次IO,而且内存里面有两份一样的数据,空间占用大。
零拷贝是操作系统提供的一种技术,操作系统提供了一个函数,通过这个函数就可以实现零拷贝,看一下零拷贝的过程吧。
零拷贝可以减少IO操作次数,减少内存空间占用,内存里面实际上只有一份内容,网络发送读取的就是那个内容。没有发送内存拷贝动作。
用零拷贝技术重写代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 import java.io.IOException;import java.nio.ByteBuffer;import java.nio.channels.*;import java.nio.file.Path;import java.nio.file.Paths;import java.util.Iterator;import java.util.Set;public class NIOZeroCopyHttpServer { private static final int PORT = 8888 ; private static final String FILE_PATH = "HelloWorld.java" ; public static void main (String[] args) { try { new NIOZeroCopyHttpServer ().start(); } catch (IOException e) { System.err.println("Server error: " + e.getMessage()); e.printStackTrace(); } } public void start () throws IOException { Selector selector = Selector.open(); ServerSocketChannel serverChannel = ServerSocketChannel.open(); serverChannel.bind(new java .net.InetSocketAddress(PORT)); serverChannel.configureBlocking(false ); serverChannel.register(selector, SelectionKey.OP_ACCEPT); System.out.println("Server started on port " + PORT); while (true ) { selector.select(); Set<SelectionKey> selectedKeys = selector.selectedKeys(); Iterator<SelectionKey> keyIterator = selectedKeys.iterator(); while (keyIterator.hasNext()) { SelectionKey key = keyIterator.next(); keyIterator.remove(); if (key.isAcceptable()) { handleAccept(key, selector); } else if (key.isReadable()) { handleRead(key); } } } } private void handleAccept (SelectionKey key, Selector selector) throws IOException { ServerSocketChannel serverChannel = (ServerSocketChannel) key.channel(); SocketChannel clientChannel = serverChannel.accept(); clientChannel.configureBlocking(false ); clientChannel.register(selector, SelectionKey.OP_READ); System.out.println("Accepted connection from " + clientChannel.getRemoteAddress()); } private void handleRead (SelectionKey key) { SocketChannel clientChannel = (SocketChannel) key.channel(); ByteBuffer buffer = ByteBuffer.allocate(1024 ); try { int bytesRead = clientChannel.read(buffer); if (bytesRead == -1 ) { clientChannel.close(); return ; } buffer.flip(); String request = new String (buffer.array(), 0 , buffer.limit()); System.out.println("Received request: \n" + request); sendFileUsingZeroCopy(clientChannel, FILE_PATH); } catch (IOException e) { System.err.println("Error handling client request: " + e.getMessage()); try { clientChannel.close(); } catch (IOException ex) { System.err.println("Error closing client connection: " + ex.getMessage()); } } } private void sendFileUsingZeroCopy (SocketChannel clientChannel, String filePath) { try (FileChannel fileChannel = FileChannel.open(Paths.get(filePath))) { long fileSize = fileChannel.size(); String headers = constructHttpHeaders(fileSize); ByteBuffer headerBuffer = ByteBuffer.wrap(headers.getBytes()); while (headerBuffer.hasRemaining()) { clientChannel.write(headerBuffer); } long position = 0 ; while (position < fileSize) { position += fileChannel.transferTo(position, fileSize - position, clientChannel); } clientChannel.close(); } catch (IOException e) { System.err.println("Error sending file: " + e.getMessage()); } } private String constructHttpHeaders (long contentLength) { return "HTTP/1.1 200 OK\r\n" + "Content-Type: text/plain\r\n" + "Content-Length: " + contentLength + "\r\n" + "Connection: close\r\n" + "\r\n" ; } }
再次使用wrk压测。可以看到同样30s内,处理了48个请求,吞吐量再次提升。性能更加强大了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 10000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 100.27ms 64.55ms 208.10ms 72.92% Req/Sec 36.45 88.79 303.00 90.91% Latency Distribution 50% 62.63ms 75% 200.92ms 90% 204.08ms 99% 208.10ms 48 requests in 30.10s, 9.66KB read Socket errors: connect 7967, read 195016, write 3, timeout 0 Requests/sec: 1.59 Transfer/sec: 328.50B
零拷贝+线程池 小白又给代码加上了线程池。代码如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 import java.io.IOException;import java.nio.ByteBuffer;import java.nio.channels.*;import java.nio.file.Paths;import java.util.Iterator;import java.util.Set;import java.util.concurrent.ExecutorService;import java.util.concurrent.Executors;public class NIOThreadZeroCopyHttpServer { private static final int PORT = 8888 ; private static final String FILE_PATH = "HelloWorld.java" ; private static final int THREAD_POOL_SIZE = 10 ; private final ExecutorService threadPool = Executors.newFixedThreadPool(THREAD_POOL_SIZE); public static void main (String[] args) { try { new NIOThreadZeroCopyHttpServer ().start(); } catch (IOException e) { System.err.println("Server error: " + e.getMessage()); e.printStackTrace(); } } public void start () throws IOException { Selector selector = Selector.open(); ServerSocketChannel serverChannel = ServerSocketChannel.open(); serverChannel.bind(new java .net.InetSocketAddress(PORT)); serverChannel.configureBlocking(false ); serverChannel.register(selector, SelectionKey.OP_ACCEPT); System.out.println("Server started on port " + PORT); while (true ) { selector.select(); Set<SelectionKey> selectedKeys = selector.selectedKeys(); Iterator<SelectionKey> keyIterator = selectedKeys.iterator(); while (keyIterator.hasNext()) { SelectionKey key = keyIterator.next(); keyIterator.remove(); if (!key.isValid()) { continue ; } try { if (key.isAcceptable()) { handleAccept(key, selector); } } catch (CancelledKeyException e) { System.err.println("CancelledKeyException: " + e.getMessage()); } } } } private void handleAccept (SelectionKey key, Selector selector) throws IOException { ServerSocketChannel serverChannel = (ServerSocketChannel) key.channel(); SocketChannel clientChannel = serverChannel.accept(); clientChannel.configureBlocking(false ); clientChannel.setOption(java.net.StandardSocketOptions.TCP_NODELAY, true ); clientChannel.register(selector, SelectionKey.OP_READ); System.out.println("Accepted connection from " + clientChannel.getRemoteAddress()); threadPool.submit(() -> handleRequest(clientChannel)); } private void handleRequest (SocketChannel clientChannel) { ByteBuffer buffer = ByteBuffer.allocate(1024 ); try { int bytesRead = clientChannel.read(buffer); if (bytesRead == -1 ) { clientChannel.close(); return ; } buffer.flip(); String request = new String (buffer.array(), 0 , buffer.limit()); System.out.println("Received request: \n" + request); sendFileUsingZeroCopy(clientChannel, FILE_PATH); } catch (IOException e) { System.err.println("Error handling client request: " + e.getMessage()); try { clientChannel.close(); } catch (IOException ex) { System.err.println("Error closing client connection: " + ex.getMessage()); } } } private void sendFileUsingZeroCopy (SocketChannel clientChannel, String filePath) { try (FileChannel fileChannel = FileChannel.open(Paths.get(filePath))) { long fileSize = fileChannel.size(); String headers = constructHttpHeaders(fileSize); ByteBuffer headerBuffer = ByteBuffer.wrap(headers.getBytes()); while (headerBuffer.hasRemaining()) { clientChannel.write(headerBuffer); } long position = 0 ; while (position < fileSize) { position += fileChannel.transferTo(position, fileSize - position, clientChannel); } clientChannel.close(); } catch (IOException e) { System.err.println("Error sending file: " + e.getMessage()); } } private String constructHttpHeaders (long contentLength) { return "HTTP/1.1 200 OK\r\n" + "Content-Type: text/plain\r\n" + "Content-Length: " + contentLength + "\r\n" + "Connection: close\r\n" + "\r\n" ; } }
压测结果如下,整体性能有明显提升
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 10000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 7.64ms 8.85ms 27.32ms 82.47% Req/Sec 113.30 99.51 300.00 80.00% Latency Distribution 50% 2.09ms 75% 13.33ms 90% 23.46ms 99% 27.32ms 113 requests in 30.10s, 22.73KB read Socket errors: connect 7967, read 191435, write 12, timeout 0 Requests/sec: 3.75 Transfer/sec: 773.29B
BOSS-Worker模式 之前的代码里面,Worker线程接收到请求以后进行工作,这个时候就会占用这个请求连接,在工作。就相当于干了两份活
将这两个活,分给两个人,就能提升效率,BOSS线程池仅仅接收请求,再把请求分配给Worker线程,Worker线程仅仅需要处理任务。还有一个好处就是,BOSS可以有多个,比如多个领导负责分配任务。
新的代码如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 import java.io.IOException;import java.net.InetSocketAddress;import java.nio.ByteBuffer;import java.nio.channels.*;import java.nio.file.Paths;import java.util.Iterator;import java.util.concurrent.ExecutorService;import java.util.concurrent.Executors;public class NIOBossWorkerHttpServer { private static final int PORT = 8888 ; private static final int BUFFER_SIZE = 1024 ; private static final int BOSS_THREAD_COUNT = 1 ; private static final int WORKER_THREAD_COUNT = 10 ; private static final String FILE_PATH = "HelloWorld.java" ; public static void main (String[] args) throws IOException { ExecutorService bossThreadPool = Executors.newFixedThreadPool(BOSS_THREAD_COUNT); ExecutorService workerThreadPool = Executors.newFixedThreadPool(WORKER_THREAD_COUNT); Selector bossSelector = Selector.open(); ServerSocketChannel serverChannel = ServerSocketChannel.open(); serverChannel.configureBlocking(false ); serverChannel.bind(new InetSocketAddress (PORT)); serverChannel.register(bossSelector, SelectionKey.OP_ACCEPT); System.out.println("HTTP Server started on port " + PORT); bossThreadPool.submit(() -> { try { while (true ) { bossSelector.select(); Iterator<SelectionKey> iterator = bossSelector.selectedKeys().iterator(); while (iterator.hasNext()) { SelectionKey key = iterator.next(); iterator.remove(); if (key.isAcceptable()) { SocketChannel clientChannel = serverChannel.accept(); clientChannel.configureBlocking(false ); System.out.println("Accepted new connection: " + clientChannel.getRemoteAddress()); workerThreadPool.submit(() -> handleClient(clientChannel)); } } } } catch (IOException e) { System.err.println("Error in Boss thread: " + e.getMessage()); } }); } private static void handleClient (SocketChannel clientChannel) { try (Selector workerSelector = Selector.open()) { clientChannel.register(workerSelector, SelectionKey.OP_READ); ByteBuffer buffer = ByteBuffer.allocate(BUFFER_SIZE); while (clientChannel.isOpen()) { workerSelector.select(); Iterator<SelectionKey> iterator = workerSelector.selectedKeys().iterator(); while (iterator.hasNext()) { SelectionKey key = iterator.next(); iterator.remove(); if (key.isReadable()) { SocketChannel channel = (SocketChannel) key.channel(); buffer.clear(); int bytesRead = channel.read(buffer); if (bytesRead == -1 ) { closeChannel(channel); return ; } buffer.flip(); sendFile(channel, FILE_PATH); } } } } catch (IOException e) { System.err.println("Error in Worker thread: " + e.getMessage()); } finally { closeChannel(clientChannel); } } private static void sendFile (SocketChannel clientChannel, String filePath) { try (FileChannel fileChannel = FileChannel.open(Paths.get(filePath))) { long fileSize = fileChannel.size(); String headers = "HTTP/1.1 200 OK\r\n" + "Content-Type: text/plain\r\n" + "Content-Length: " + fileSize + "\r\n" + "\r\n" ; ByteBuffer headerBuffer = ByteBuffer.wrap(headers.getBytes()); while (headerBuffer.hasRemaining()) { clientChannel.write(headerBuffer); } long position = 0 ; while (position < fileSize) { position += fileChannel.transferTo(position, fileSize - position, clientChannel); } System.out.println("File sent successfully to: " + clientChannel.getRemoteAddress()); } catch (IOException e) { System.err.println("Error sending file: " + e.getMessage()); } } private static void closeChannel (Channel channel) { if (channel != null && channel.isOpen()) { try { channel.close(); System.out.println("Channel closed." ); } catch (IOException e) { System.err.println("Error closing channel: " + e.getMessage()); } } } }
当BOSS数量为1个的时候,压测结果。可以看到吞吐量大大提升了一波。整体性能更好了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 10000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 326.78ms 66.97ms 1.18s 95.07% Req/Sec 7.73 9.44 40.00 87.74% Latency Distribution 50% 310.27ms 75% 340.00ms 90% 369.37ms 99% 488.59ms 912 requests in 30.10s, 166.80KB read Socket errors: connect 7967, read 187538, write 0, timeout 0 Requests/sec: 30.30 Transfer/sec: 5.54KB
当BOSS数量为4个的时候,压测结果,能看到性能再次提升了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 10000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 221.00ms 25.30ms 331.05ms 85.11% Req/Sec 23.14 14.81 70.00 50.55% Latency Distribution 50% 211.31ms 75% 226.24ms 90% 257.96ms 99% 297.11ms 1350 requests in 30.10s, 246.66KB read Socket errors: connect 7967, read 242633, write 0, timeout 0 Requests/sec: 44.85 Transfer/sec: 8.19KB
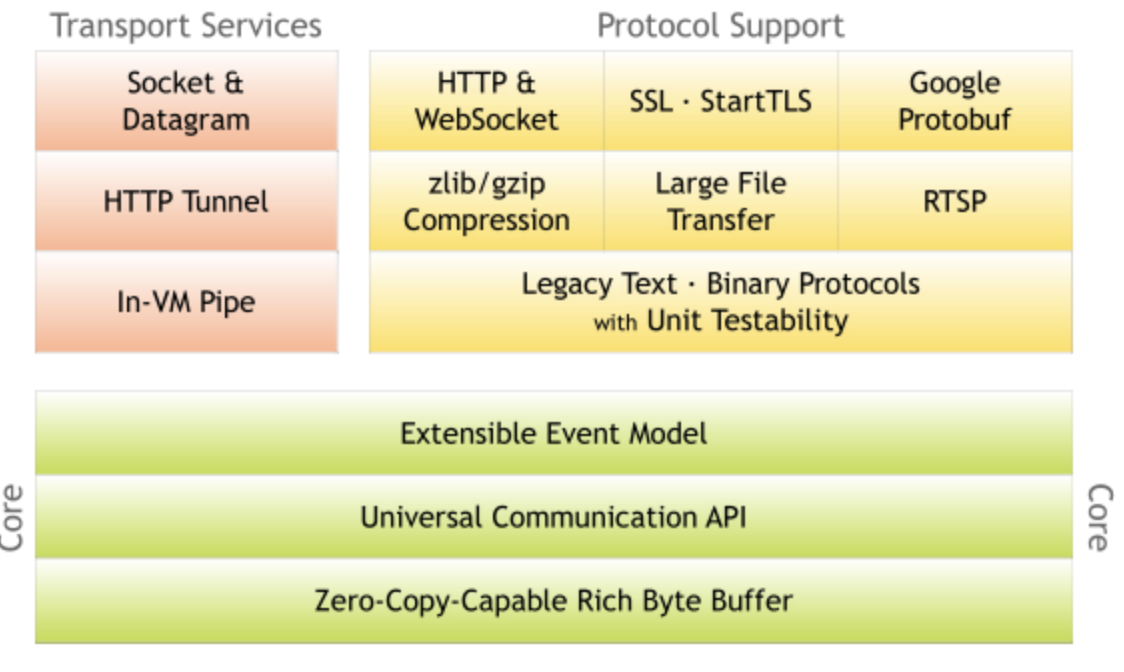
netty Netty是一个NIO客户端服务器框架,可以快速轻松地开发网络应用程序,例如协议服务器和客户端。它极大地简化了网络编程,如TCP和UDP套接字服务器。
netty就是基于上述的网络编程实现的,区别就是netty封装的更好,更完善,做了一些优化,支持了更多的协议。参考netty官网的架构图。
可以看到支持TCP、UDP, 支持大文件传输,支持压缩,支持HTTP、HTTPS、SMTP邮件、Google Protobuf一般用来实现RPC,通过事件模型实现,还实现了零拷贝技术。
如何使用netty来实现上面的服务器 通过netty实现的话,代码简单了很多,只需要关注读取文件并返回给客户端这个逻辑就可以了。但是其根本模型没有变化,比如BOSS和Worker,还有零拷贝,线程池,NIO技术,这些是netty的核心,他只是增加了更多的逻辑,支持,优化等。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 package org.example;import io.netty.bootstrap.ServerBootstrap;import io.netty.buffer.Unpooled;import io.netty.channel.*;import io.netty.channel.nio.NioEventLoopGroup;import io.netty.handler.codec.http.*;import io.netty.handler.codec.http.HttpHeaders;import io.netty.handler.stream.ChunkedWriteHandler;import io.netty.util.CharsetUtil;import java.io.File;import java.io.IOException;import java.nio.file.Files;import java.nio.file.Paths;public class Main { private static final int PORT = 8888 ; public static void main (String[] args) { EventLoopGroup bossGroup = new NioEventLoopGroup (1 ); EventLoopGroup workerGroup = new NioEventLoopGroup (10 ); try { ServerBootstrap b = new ServerBootstrap (); b.group(bossGroup, workerGroup) .channel(io.netty.channel.socket.nio.NioServerSocketChannel.class) .childHandler(new ChannelInitializer <Channel>() { @Override protected void initChannel (Channel ch) { ch.pipeline().addLast(new HttpServerCodec ()); ch.pipeline().addLast(new HttpObjectAggregator (65536 )); ch.pipeline().addLast(new ChunkedWriteHandler ()); ch.pipeline().addLast(new HelloWorldServerHandler ()); } }); ChannelFuture f = b.bind(PORT).sync(); System.out.println("Server started on port 8888..." ); f.channel().closeFuture().sync(); } catch (InterruptedException e) { e.printStackTrace(); } finally { workerGroup.shutdownGracefully(); bossGroup.shutdownGracefully(); } } } class HelloWorldServerHandler extends SimpleChannelInboundHandler <FullHttpRequest> { @Override protected void channelRead0 (ChannelHandlerContext ctx, FullHttpRequest msg) throws Exception { File file = new File ("./HelloWorld.java" ); if (file.exists()) { byte [] fileContent = Files.readAllBytes(file.toPath()); FullHttpResponse response = new DefaultFullHttpResponse (HttpVersion.HTTP_1_1, HttpResponseStatus.OK, Unpooled.copiedBuffer(fileContent)); response.headers().set(HttpHeaders.Names.CONTENT_TYPE, "text/plain; charset=UTF-8" ); response.headers().set(HttpHeaders.Names.CONTENT_LENGTH, response.content().readableBytes()); ctx.writeAndFlush(response).addListener(ChannelFutureListener.CLOSE); } else { FullHttpResponse response = new DefaultFullHttpResponse (HttpVersion.HTTP_1_1, HttpResponseStatus.NOT_FOUND, Unpooled.copiedBuffer("File Not Found" .getBytes(CharsetUtil.UTF_8))); response.headers().set(HttpHeaders.Names.CONTENT_TYPE, "text/plain; charset=UTF-8" ); response.headers().set(HttpHeaders.Names.CONTENT_LENGTH, response.content().readableBytes()); ctx.writeAndFlush(response).addListener(ChannelFutureListener.CLOSE); } } }
压测结果,性能很高。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 10000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 8.39ms 12.28ms 113.55ms 92.66% Req/Sec 192.24 343.10 2.51k 88.08% Latency Distribution 50% 4.41ms 75% 9.55ms 90% 17.22ms 99% 72.18ms 15693 requests in 30.10s, 3.02MB read Socket errors: connect 7967, read 22110, write 1, timeout 0 Requests/sec: 521.32 Transfer/sec: 102.84KB
并发测试对比 上面都是10个线程并发10000测试的结果。我们现在改成并发1000,再做个对比。
netty实现的压测结果,和10000没什么区别
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 1000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 94.20ms 178.90ms 896.17ms 86.02% Req/Sec 324.69 443.24 2.20k 85.19% Latency Distribution 50% 10.05ms 75% 49.68ms 90% 365.89ms 99% 724.64ms 16390 requests in 30.05s, 3.16MB read Socket errors: connect 0, read 36092, write 117, timeout 0 Requests/sec: 545.36 Transfer/sec: 107.58KB
我们自己实现的BOSS-Worker代码,压测结果,1000并发的性能提升很明显。因为我们的实现更加原始,而netty的实现更重。更注重高并发,对于低并发而言我们的实现更好,这也说明我们确实实现了netty的核心功能。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 1000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 205.91us 529.03us 75.25ms 99.30% Req/Sec 15.51k 5.85k 25.50k 62.44% Latency Distribution 50% 177.00us 75% 207.00us 90% 245.00us 99% 518.00us 1389306 requests in 30.09s, 247.76MB read Socket errors: connect 0, read 10787, write 0, timeout 0 Requests/sec: 46169.43 Transfer/sec: 8.23MB
接下来是线程池+NIO+零拷贝的实现压测结果。对于低并发的性能同样很好,但是比BOSS-Worker实现低了很多很多。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 1000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 7.38ms 13.68ms 201.55ms 91.31% Req/Sec 102.92 287.63 2.54k 92.41% Latency Distribution 50% 3.65ms 75% 6.38ms 90% 18.18ms 99% 68.71ms 11677 requests in 30.08s, 2.29MB read Socket errors: connect 0, read 454831, write 242, timeout 0 Requests/sec: 388.15 Transfer/sec: 78.09KB
接下来试试NIO+零拷贝的实现压测结果。可以看到结果也很棒
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 1000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 4.49ms 9.53ms 178.38ms 93.80% Req/Sec 127.52 313.84 2.42k 91.95% Latency Distribution 50% 2.21ms 75% 4.10ms 90% 8.91ms 99% 41.68ms 13680 requests in 30.06s, 2.69MB read Socket errors: connect 0, read 80895, write 7, timeout 0 Requests/sec: 455.12 Transfer/sec: 91.56KB
再看看NIO的实现压测结果,因为没有零拷贝,所以执行时间增加了很多。尤其是最大延迟,吞吐量也有降低。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 1000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 8.24ms 27.62ms 675.49ms 96.24% Req/Sec 125.39 301.56 3.01k 91.31% Latency Distribution 50% 2.22ms 75% 9.52ms 90% 24.23ms 99% 45.71ms 11657 requests in 30.10s, 2.08MB read Socket errors: connect 0, read 87555, write 1308, timeout 0 Requests/sec: 387.33 Transfer/sec: 70.73KB
最后看看BIO的实现吧。可以看到吞吐量还是低了不少的。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 Running 30s test @ http://localhost:8888 10 threads and 1000 connections Thread Stats Avg Stdev Max +/- Stdev Latency 55.22ms 48.14ms 181.62ms 65.71% Req/Sec 83.94 221.86 1.33k 93.39% Latency Distribution 50% 48.44ms 75% 68.44ms 90% 153.94ms 99% 170.59ms 5304 requests in 30.09s, 1.08MB read Socket errors: connect 0, read 60714, write 723, timeout 0 Requests/sec: 176.29 Transfer/sec: 36.67KB
整体总结而言,主要的提升手段是NIO和BOSS-Worker模型,零拷贝也有一定的性能提升。