CMU15445笔记
数据库
数据库就是管理文件的一个程序。将文件管理抽象出来不同的结构,如关系数据库,文档数据库,图数据库等。方便管理,使用,并能进行复杂的操作,如事务等。更加通用使任何语言都可以使用。对于多个进程并发修改一个文件,那么数据库可以提供更好的性能和解决方案。
数据模型
- 关系模型:大多数数据库使用的
- 键值对模型:NOSql使用的,比如redis
- 图模型:NOSql使用的
- 文档模型:NOSql使用的,比如mongoDB
- 列存储模型
- 数组,向量模型:向量数据库,如Fassi
- 分组模型,网络模型,多值模型:已经很少使用的模型
关系模型
Ted Codd在1969年设计了关系模型。发表了A relational model of data for large shared data banks
关系模型将物理层和逻辑层分离,当数据的内部表示发生变化时,甚至当外部表示的某些方面发生变化时,用户在终端和大多数应用程序上的活动应该不受影响。
关系模型提供了一种仅用数据的自然结构来描述数据的方法,因此,它为高级数据语言提供了一个基础,这种语言将一方面在程序之间产生最大的独立性,另一方面在机器表示和数据组织之间产生最大的独立性。另一个优点是,它为处理关系的可导出性、冗余性和一致性提供了坚实的基础。
仍然需要消除的三种主要数据依赖是:顺序依赖、索引依赖和访问路径依赖。
- 顺序依赖:程序展示的顺序和文件内容的存储顺序并不一致,需要各自独立。
- 索引依赖:如果程序使用索引的时候,索引被删除那么程序将出错。
- 访问路径依赖:访问数据的时候依赖数据的物理结构。
关系指的是数学意义上的关系,对于给定集合S1,S2,S3…Sn,R是n个集合上的关系,如果它是n个元组的集合,每个元组的第一个元素来自S1,第二个来自S2,以此类推。我们称Sj是R上的第j个定义域。R的阶为n(degree n),阶为1的时候称为一元关系,2的时候称为二元关系,阶为n称为n元关系。
关键原则:
- 将数据存储在简单的数据结构(关系)中
- 物理存储留给DBMS实现
- 通过高级语言访问数据,DBMS确定最佳策略。
结构采用关系。确保数据库内容满足完整性约束。程序通过接口来访问和修改数据库内容。
关系是无序的,n元关系就是n个列的表。一个元组是一行记录。
高级SQL
PostegreSQL:由伯克利大学开发,是之前开发Ingres的人开发的。
IBM的DB2支持SQL,所以SQL成为了标准。
数据库支持SQL,最低要支持SQL-92标准。
下面的sql在postgreSQL中会报错,mysql中如果sql_mode是ansi也会报错,如果sql_mode是traditional就不会报错,而是会随机选一个cid展示出来。
1 | select avg(s.gpa), e.cid from enrolled as e,student as s |
字符串处理
| 名称 | 大小写 | 引号 | 字符串拼接 |
|---|---|---|---|
| SQL-92 | 敏感的 | 单引号 | || |
| PostgreSQL | 敏感的 | 单引号 | + |
| mysql | 不敏感的 | 单引号/双引号 | concat / 空格 |
| SQLite | 敏感的 | 单引号/双引号 | + |
| |DB2 | 敏感的 | 单引号 | || |
| Oracle | 敏感的 | 单引号 | || |
时间日期处理
| 名称 | 当前日期 NOW() | 当前日期 CURRENT_TIMESTAMP() | 当前日期 CURRENT_TIMESTAMP | 日期差值 |
|---|---|---|---|---|
| PostgreSQL | 2023-04-26 14:27:01.790522+08 | 不支持 | 2023-04-26 14:27:32.280334+08 | select DATE(‘2018-08-29’) - DATE(‘2018-01-01’); 结果240 |
| mysql | 2023-04-26 14:28:36 | 2023-04-26 14:28:44 | 2023-04-26 14:28:56 | select DATEDIFF(DATE(“2018-08-29”),DATE(“2018-01-01”)); 结果240 |
| SQLite | 不支持 | 不支持 | 2023-04-26 06:30:47 | select CAST((julianday(‘2018-08-29’) - julianday(‘2018-01-01’)) as INT) as days; 结果 240 |
复制表数据
create table会创建表,insert into需要表已经存在。
1 | create table student2 ( |
获取id最大的一个学生数据
下面的是错误做法,因为不知道id最大的name是谁,会报错,如果sql_mode=tranditional,会执行成功,但是name是随机的。
1 | select MAX(e.sid),s.name from enrolled as e,student as s |
下面的在postgresql和mysql都可以执行成功,并获取到id最大的name数据。
1 | select sid, name from student |
下面的SQL在postgresql中可以执行成功,结果和上面的一样,而在mysql8中报错This version of MySQL doesn't yet support 'LIMIT & IN/ALL/ANY/SOME subquery'
1 | select sid, name from student |
获取没有学生报名的课程
下面的sql在postgresql 和 mysql 中都可以得到正确的结果
1 | select * from course |
window窗口
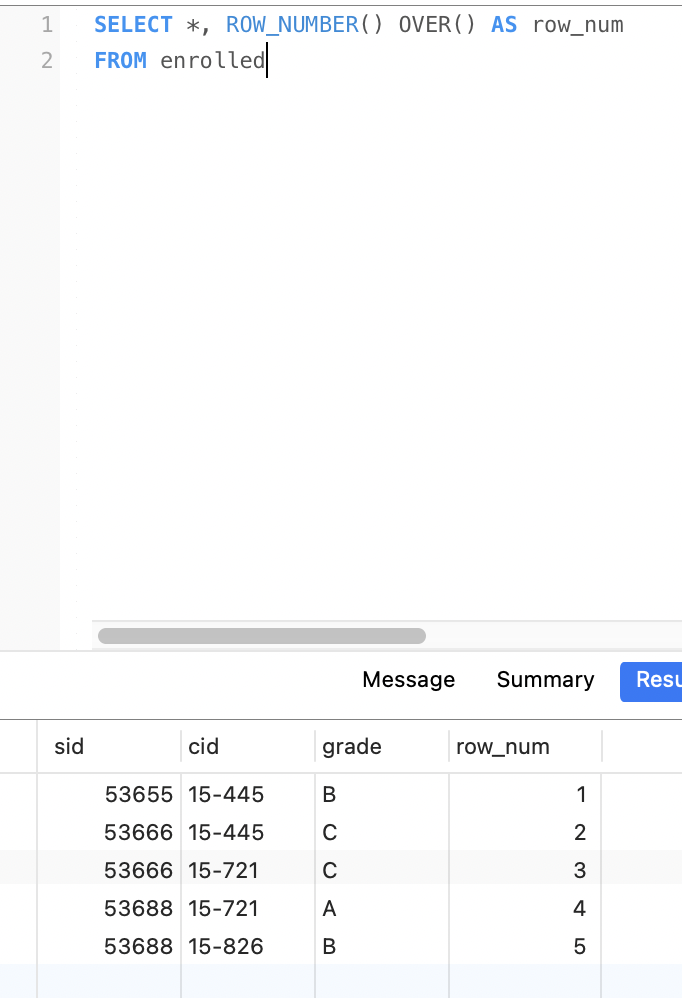
ROW_NUMBER和RANK都需要和OVER一起使用。
- ROW_NUMBER(): 显示当前行号
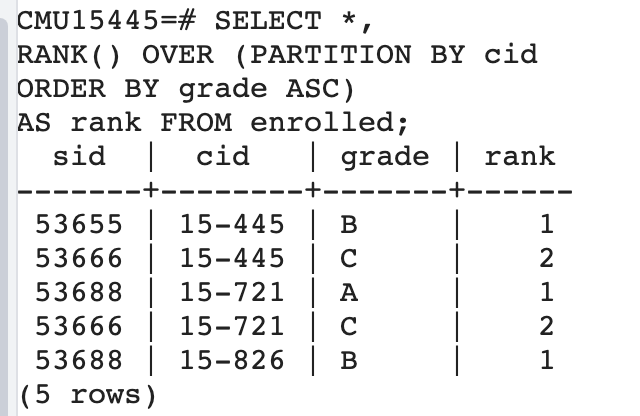
- RANK() : 显示排序后的排名,如果没有排序,都是1
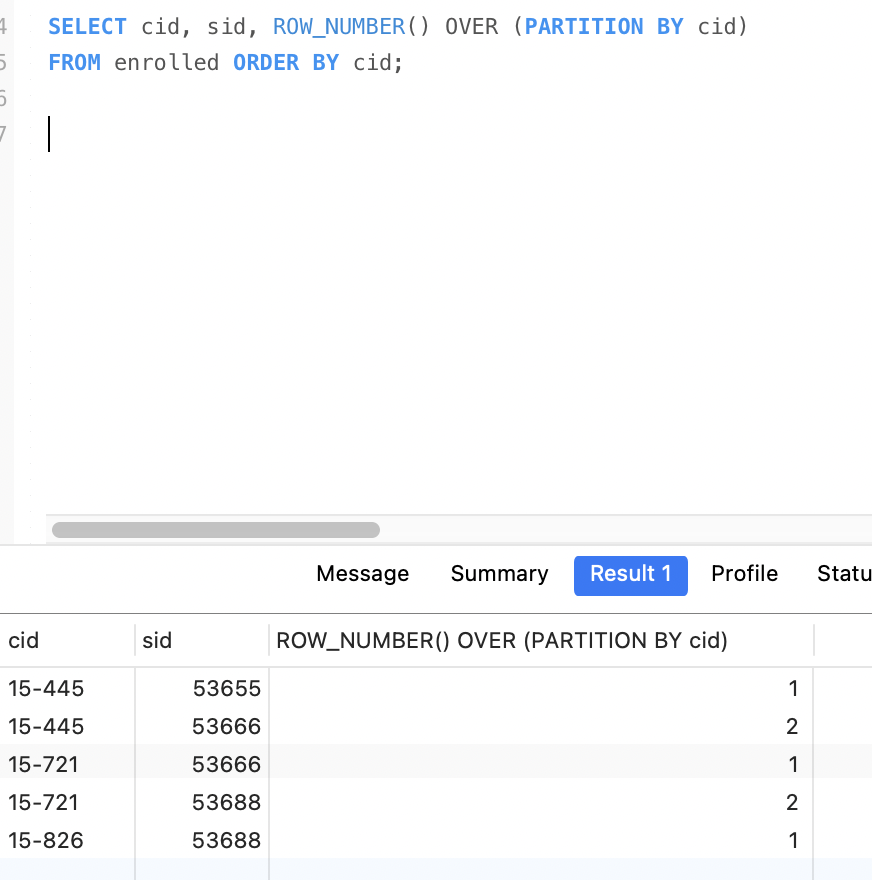
- OVER()
- PARTITION BY 进行分组
- GROUP BY 进行分组
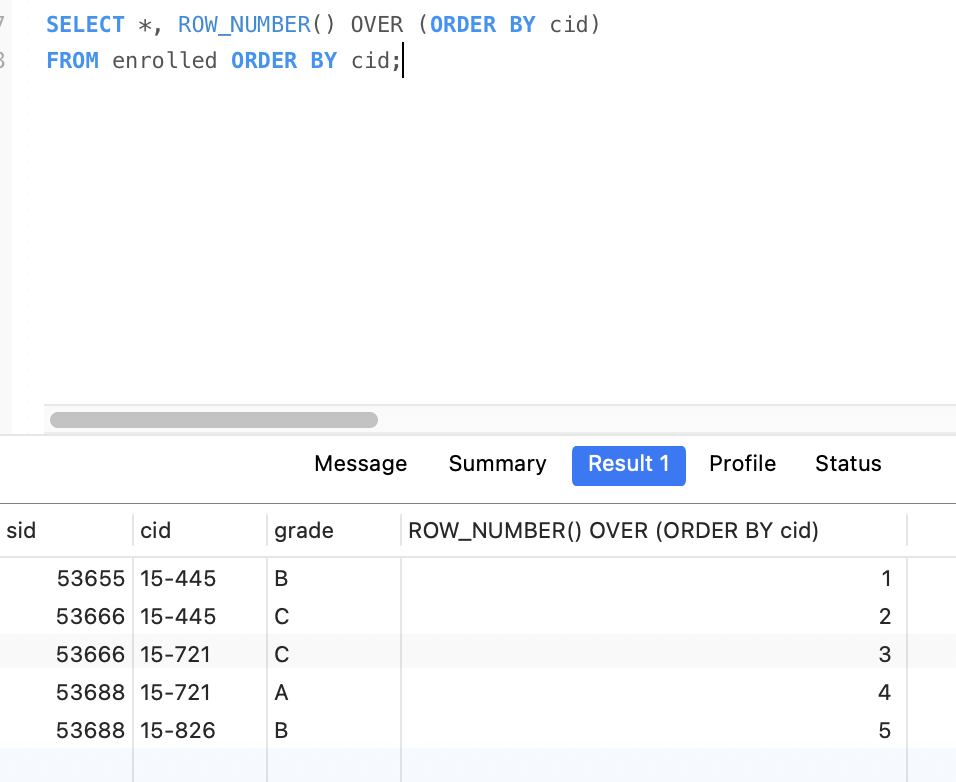
- ORDER BY 排序
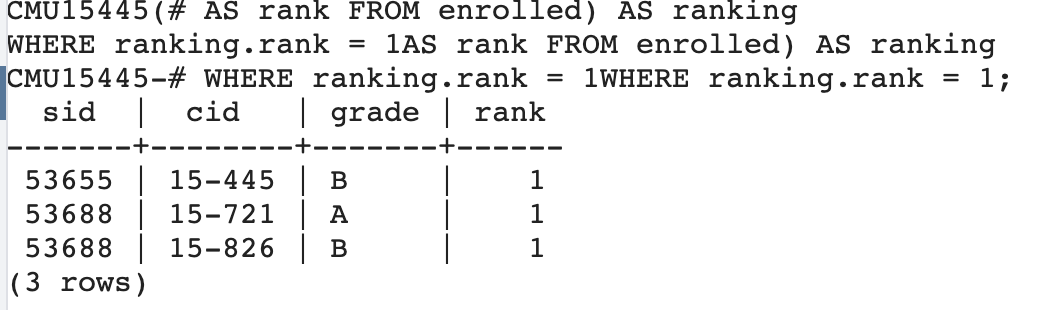
获取每个课程中分数最高的学生信息
下面的SQL,在postgresql中执行成功,mysql8执行报错。
首先查询所有课程信息,并按照课程分组,按照分数排序。
1 | SELECT *, |
接着搜索上表中分数为1,也就是分数最高的学生。也就是每个课分数最高的学生信息。
1 | SELECT * FROM ( |
CTE(common table expressions)
使用CTE实现获取每个课程中分数最高的学生信息。
通过WITH语句来声明一个临时表。表名cteSource,表的内容就是最的sid,通过SELECT MAX(sid) FROM enrolled查询出来的结果。字段名叫maxId。
然后在查询语句里面就可以连接cteSource表,然后通过sid = cteSource.maxId 来获取到sid最大的用户信息。
1 | WITH cteSource (maxId) AS ( |
还有一些其他的用法,比如:
1 | WITH cte1 (col1) AS ( |
lateral join
mysql目前还不支持该功能,postgreSQL和Sqlserver等支持。
数据存储
页的三个概念
- 硬件上的页面(通常是4KB)
- 操作系统上的页面(4KB,x64 2MB/1GB)
- 数据库页面(512B-32KB)
磁盘和内存通信是一页一页的,如果数据都在一页里,后续的访问请求就可以走内存了,要不然还的从磁盘获取。内存中可以获取bit数据。
系统设计目标:给应用程序一个错觉,能提供足够的内存将整个数据库存入内存中。
实现:谨慎的最小化每次从磁盘读取内容或运行查询时所带来的影响。
流程:
- 查询执行器:向内存中的
buffer pool请求查询内容。 - buffer pool: 如果数据所在的页已经在buffer pool中,就直接返回。如果数据所在的页不在buffer pool中,就向磁盘中的
database file请求。 - database file: 有页目录,还有具体的页,数据存在页中,查询页目录找到对应的页返回给
buffer pool。
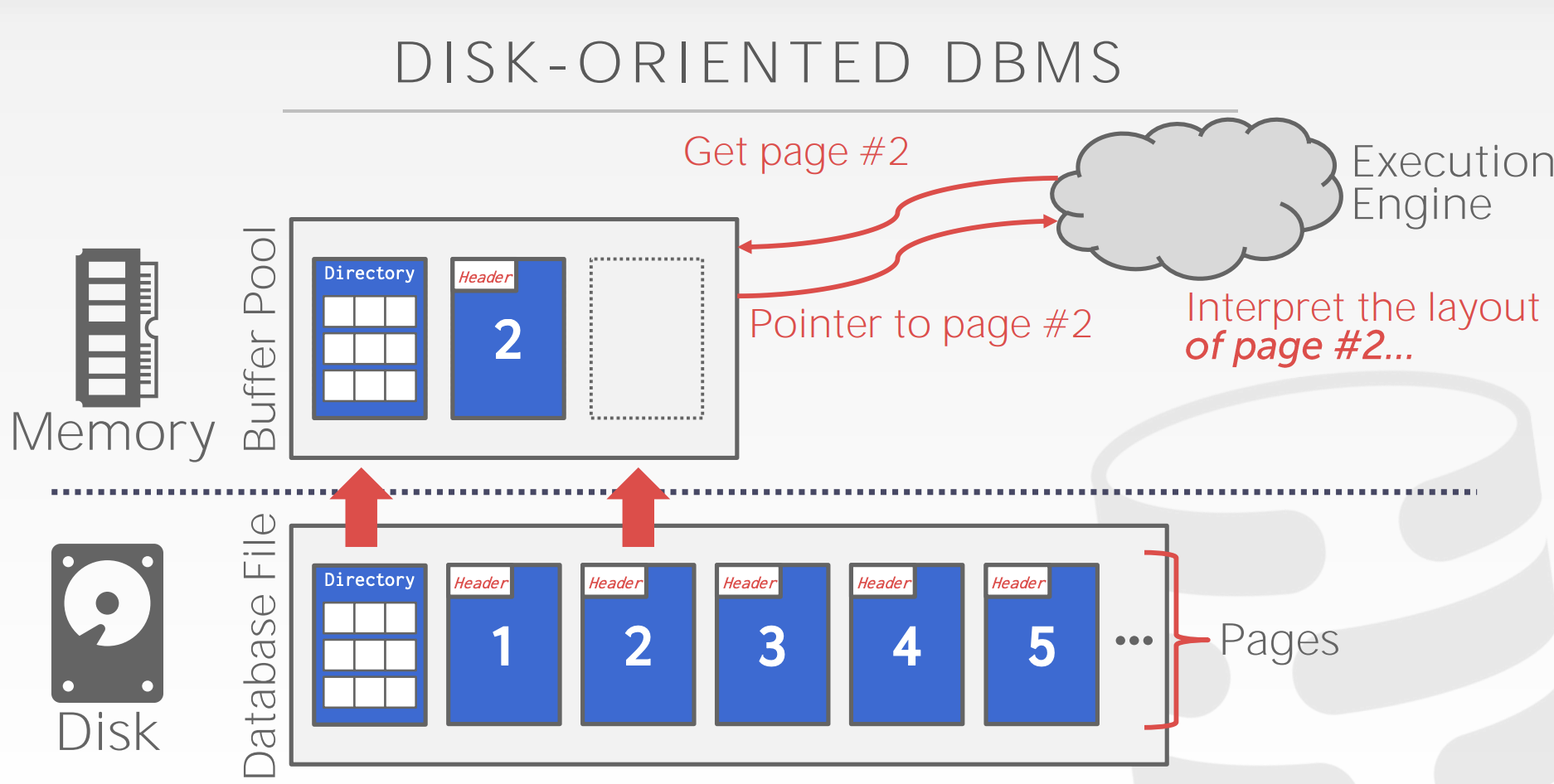
上面的步骤操作系统本身就可以实现,比如使用mmap,但是操作系统是统一的动作,遇到一些问题不知道该如何处理,而DBMS则可以根据不同的情况做不同的处理,进行优化。像主流的mysql,SqlServer,Oracle都没有用mmap。mongoDB早期使用的mmap,后面也是用WiredTiger替换掉了mmap。
DBMS自己实现的话,主要关心的两个问题:
- 如何表示磁盘上文件的数据
- 如何管理内存以及在硬盘间移动数据
如何表示磁盘上文件的数据
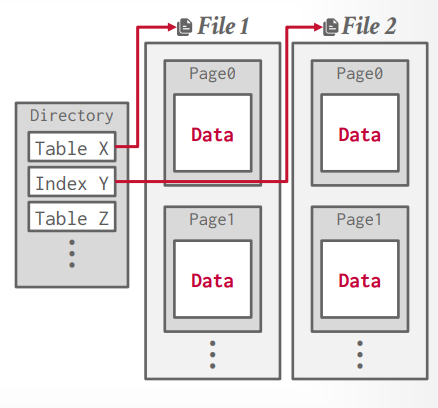
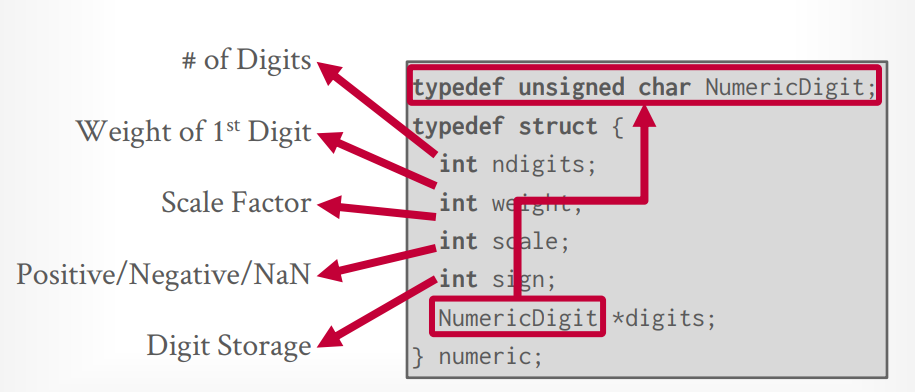
数据库的数据最终以文件的形式放在磁盘中。通过文件读写将数据读写到文件中。文件有特定的格式,具体的内容有数据库进行解析然后展示在数据库中。这就是storage manager or storage engine。
storage manager负责文件的读写工作。所有的文件(不管是一个或者多个)以 page 的形式存储,管理多个 page 组成的集合。
一个page就是一个固定大小的数据块。page 可以保存任何东西,tupe, metadata, indexes, log等等。每个page有唯一的ID,是page ID。
有些page要求是独立的,自包含的(self-contained)。比如mysql的InnoDB。因为这样的话一个表的元数据和本身的数据内容在一起,如果发生问题的话,可以找回元数据和数据。如果元数据和数据在不同的page中,如果发生问题导致元数据的page丢失,那么数据则恢复不了了。
indirection layer记录page ID的相对位置,方便找到对应的偏移量。这样page目录就能找到对应的page。
不同的DBMS对于文件在磁盘上的存储方式不一样,有下面几种
- 堆存储
- 树存储
- 有序文件存储(ISAM)
- hashing文件存储
堆存储
- 无序的,保存的顺序和存储的顺序无关。
- 需要读写page
- 遍历所有的page
- 需要元数据记录哪些是空闲的page,哪些是已经使用的page。
- 使用
page directory方式来记录文件位置。
page directory
- 存储page ID和所在位置的关系
- 存储page的空闲空间信息
page header
- page 大小
- checksum 校验和
- DBMS版本信息
- 事务可见性
- 压缩信息
page layout
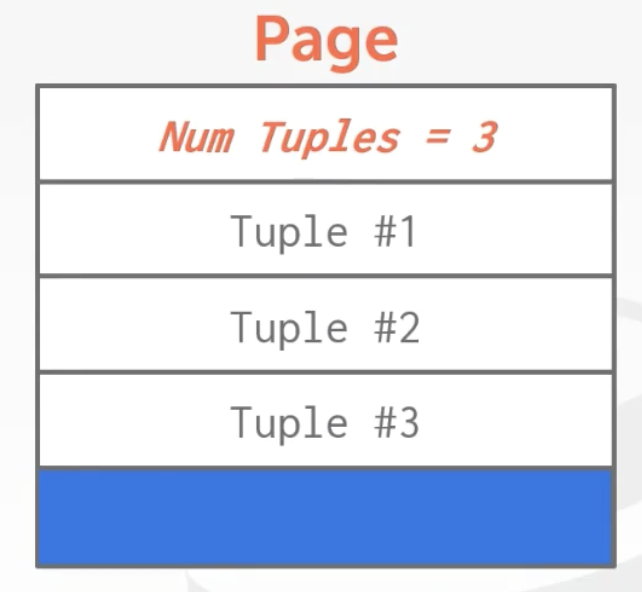
tuple oriented storage
一般想法,直接存储,并在后面追加,但是对于可变数据长度很难管理。
- 记录page数,也就是page内部可插入的偏移量
- 一个一个tupe按照顺序存储
所以,page内部,通常不使用上面那种,而使用的是slotted pages
- slotted pages
- slot array 存储插槽信息的偏移量,通过他找到对应的tuple
- 支持可变长度的 tuple
- 但是会产生一些碎片空间,因为太小,tuple放不下。
- 压缩可以去除碎片空间,但是压缩的时候这个page就不能读写了。
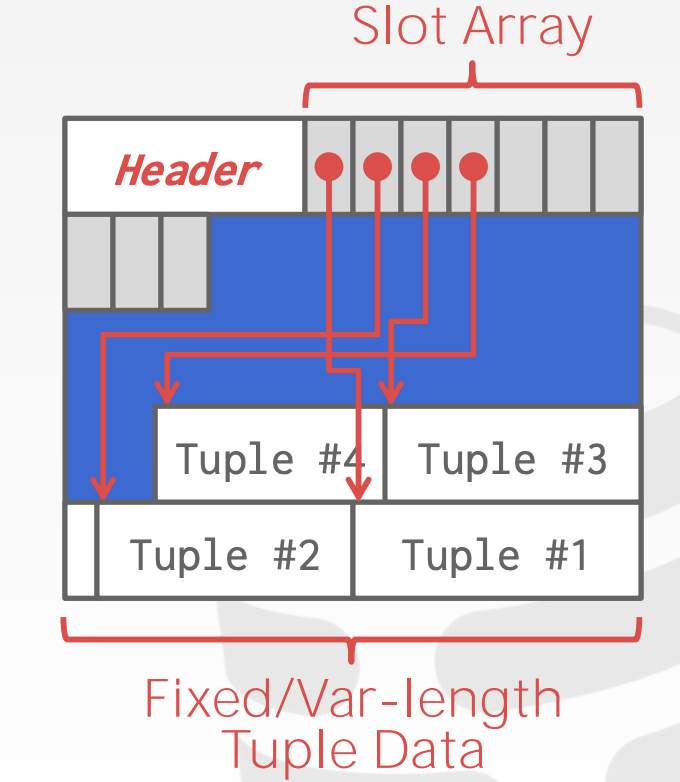
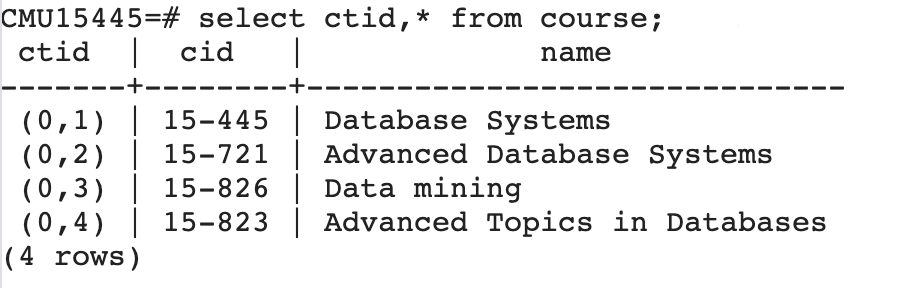
record ID表示一个tuple的物理位置,不同的DBMS有不同的名称,来表示数据的唯一位置,比如postgresql的ctid,oracle的rowid。ctid由page id和slot number组成。
插入新的tuple的时候
- 检查page direactory,找到一个page里面有空的可用的slot
- 如果该page不在内存,就从磁盘上获取它,将它加载到内存
- 在page里面检查slot array,找到一个空的空间,将tuple插入
更新tuple的时候
- 检查page direactory,找到tuple对应的page
- 如果该page不在内存,就从磁盘上获取它,将它加载到内存
- 在page里面通过slot array获取tuple的偏移量
- 如果数据空间合适,那么直接覆盖该tuple,否则,将原来的tuple标记为已删除,并将新tuple插入其他page。
因此更新的时候有一些问题
- page会产生碎片空间
- 更新的时候需要从磁盘获取整个page
- 更新多条数据的时候,可能多个tuple在多个page中,产生随机IO
所以有些DBMS不能更新数据,只能增加数据,比如HDFS等
Log Structured Storage
比如HBase,ClickHouse,RocksDB,LevelDB都是这个方式。
这种方式的一些问题:
- Write-Amplification:在该tuple的生命周期里面可能写入无数次磁盘,并一直在那里且不被需要。
- Compaction is Expensive:
Index Organized Storage
tuple
- header
- 列1
- 列2
- 列n
tupe layout
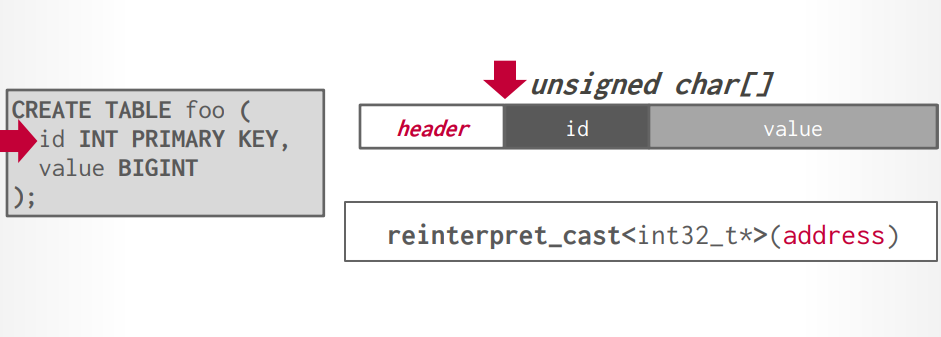
tuple就是一堆bit,DBMS解释他们的作用。里面包含
- header
- data
data layout
table foo
- id int primary key
- value bigint
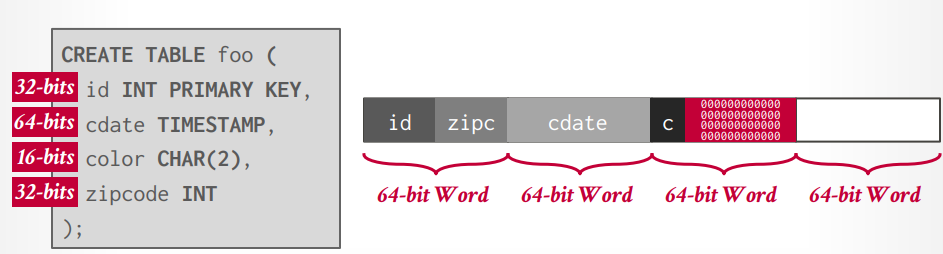
数据对齐
现代CPU是64位对齐,创建表以后,DBMS会自动的将数据进行对齐存储,不过,如果在创建表的时候考虑对齐,可以优化速度和存储空间。
数据表示
可变长度的数据varchar,varbinary,text,blob,他们的长度存在header里面。
日期时间类型存储的是时间戳。
float/real/double: 是浮点数,cpu支持浮点数运算,优点是速度快,但是会精度缺失
decimal: 是定点数,运算速度慢,但是精度高。
large values,应该避免这样,因为维护overflow page很麻烦。
- tuple中存储另外一个page页的指针,将具体数据存放到另外一个page页中。
- postgresql中叫
toast,如果数据大于2KB,就会放到toast中,tuple中只存储指针。 - mysql中叫
overflow page,如果数据大于1/2的page大小,就会放进去,tuple中只存储指针。
外部存储
- tuple中存储指向外部文件的指针或者文件地址。
NULL存储
- 行数据库通常是在Header里面增加bit map来判断是否是null
- 列数据库通常使用占位符来标识NULL
- 在每个属性前面增加bit来标识是否是NULL,这么做会破坏对齐,或增加存储空间,MySQL曾使用这个方法,后来抛弃了这个方法。
- NULL == NULL 是 NULL, NULL is NULL 是 true
catalogs 用来存储数据库元信息,大多数数据库将这些信息存到一张表里面
- 表,字段,索引,视图等
- 用户,权限,安全等
- 内部数据统计等
- infomation schemal api 通过这个来获取catalogs信息
- mysql
- show tables 获取所有的表
- describe table_name 获取表的信息
- postgresql
- \d or \d+ 获取所有的表
- \d table_name 获取表信息
- mysql
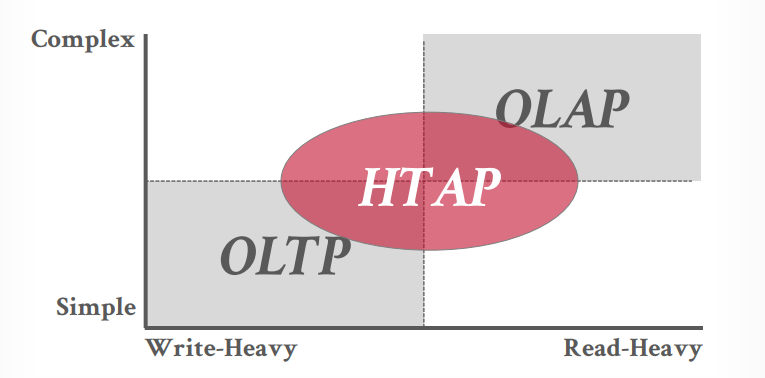
DATABASE WORKLOADS
OLTP
- 通常是业务侧使用的传统数据库,比如oracle,postgresql,mysql
- 小的业务多次执行,比如多个简单的插入,更新,查询
OLAP
- 通常是大数据,数据分析来使用,比如Hbase等,支持复杂的数据查询
- OLAP位于OLTP的后方
HTAP
- OLTP和OLAP的混合,两个都可以做
N-ary 模型
- 行存储模型
- page里面是按行存储的,每个tuple就是一行
优点
- 快速的insert,update,delete
- 查找的优势是数据都在一起
- 能在集群中使用
index-oriented物理存储方式
缺点
- 不适合扫描table中大部分
and/or属性的子集 - 访问的内存局部性糟糕,查找数据的弊端是会加载一个page的时候会加载不需要的行数据
- 不适合压缩,因为一个page里面有不同的
value domains
Decomposition 模型
- 列存储模型
- 一个page里面是一列数据
优点
- 优势是查找的时候不会加载不需要的数据
- 更快的查询过程,因为有更好的局部性和
cached data重用 - 更好的数据压缩
缺点
- 劣势是查找的数据不在一起,需要去各个page里面找。所以insert update delete也更慢。
列存储查询的时候处理where子句以后需要找到对应的其他列在其他page中的位置,有两个方法,通常使用第一个方法,第二个方法并不好
- 固定长度:每个page中的每个列的长度都固定,顺序也一样,这样通过where子句对应列的偏移量,就可以确定其余列的偏移量
- 内嵌tuple id: 每个值里面都加入对应的tuple id,根据tuple id查询其他列
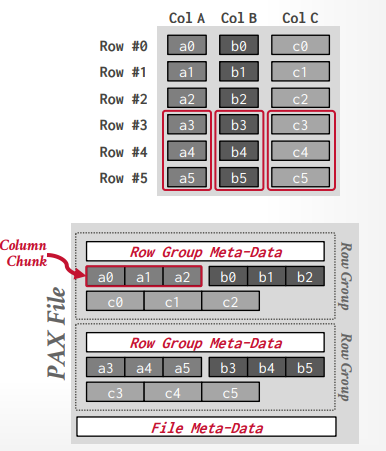
Partition Attributes Across(PAX) Storage 模型
- 将行存储和列存储混合的模型
- 目标是保留列存储的快速处理和行存储的空间局部性优势(这里空间局部性优势指访问的数据在一起)
- 比如Apache ORC,Apache Arrow, Apache Parquet.
PAX 物理数据组织
- 水平划分为
row groups,即一些行数据的集合 - 在
row groups里面垂直划分为column chunks,即列的集合,也就是列存储方式 - 每个
column chunks下面可能还会有page
数据库压缩
目标1:必须产生固定长度的值
目标2:在查询期间尽可能推迟解压缩,你不希望先解压缩在查询,这样很占空间且影响速度
目标3:必须是无损方案
压缩粒度
- Block-level: 压缩同一张表的tuple
- Tuple-level: 压缩整个tuple的内容(仅限行存储)
- Attribute-level:压缩同一个tuple的多个属性或单个属性
- Column-level:压缩存储于多个tuple中的一个或多个属性的多个值(仅限列存储)
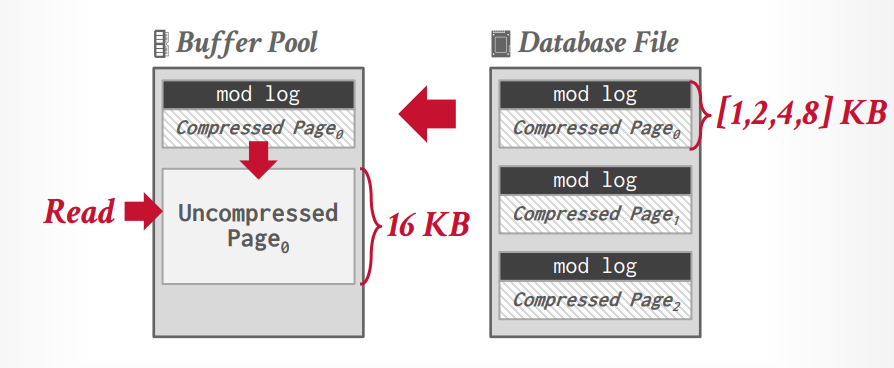
mysql innodb 压缩
innodb 在写入的时候可以不解压,但是读取的时候会先在buffer pool中解压在读取。因此Mysql innodb的压缩的好处是提升空间利用率,减少了磁盘IO,缺点是读取的时候需要解压,因此增加了这部分的时间和CPU功耗以及解压以后会占用更多的内存空间。
innodb 默认page 是 16KB,可以压缩到1/2/4/8KB。
Column-level 压缩算法
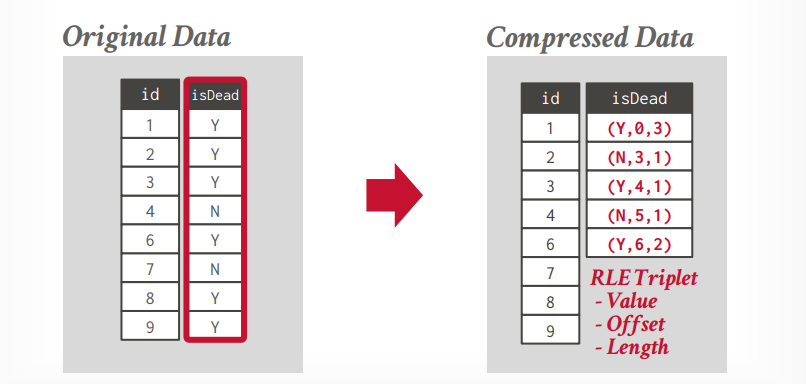
run length encoding
将单个column中的相同值压缩成三元组,需要对列进行智能排序,以最大限度地提高压缩机会。
- 属性的值
- column segment的起始位置
- 值的数量
比如下面的数据,将压缩成右边的数据,(Y,0,3),代表值是Y,起始位置0,值的数量有3个。后面的压缩数据是一样的。这种压缩方法可以快速计算count的数量等。
如果你的值类型很少,且有序,那么将大大减少空间占用。
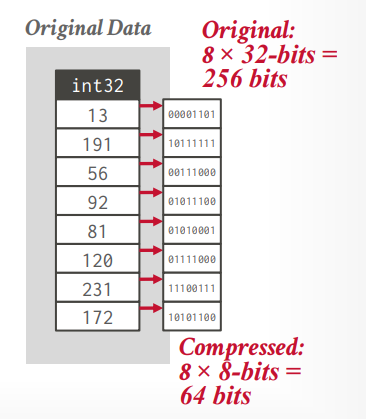
bit packing
如果字段里面的值都比较小,但是column type很大,可以忽略掉不需要的bit,比如int是32 bit,但是里面的值都很小,用不了这么多,就可以忽略他们。
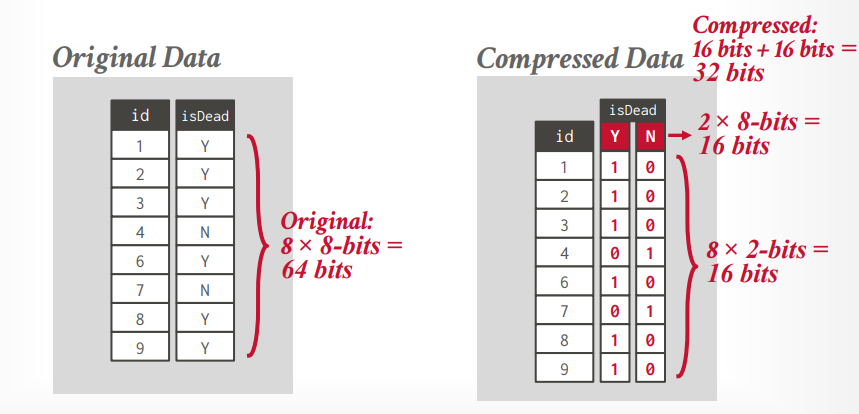
bit map encoding
使用bit map来标识数据值,仅仅适用于值的类型比较少的。
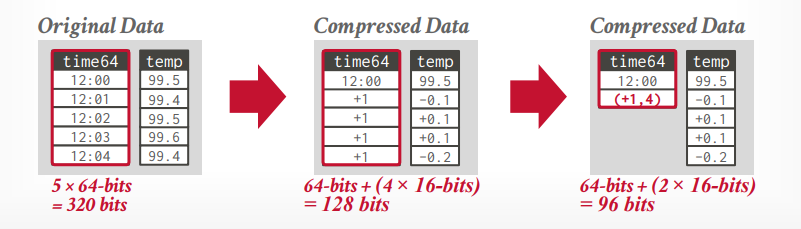
delta encoding
找到一个基本的数据,以它为基础,进行压缩,+1,-1这种。再将其按照run length encoding的方式压缩,可以再次节省空间。
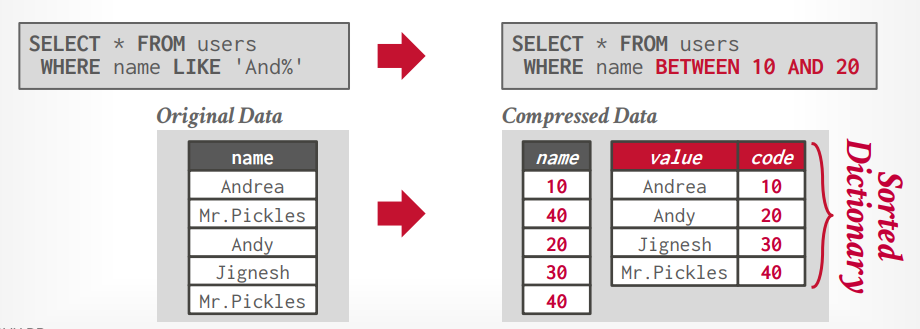
DICTIONARY COMPRESSION
按照字典将数据进行映射,并存储,这样可以节省空间,如果在字典映射的时候还能先排序,那么还可以完成将where like 'and%'转成where between 10 and 20。
buffer pool 和内存管理
时间管理
- 将数据写入磁盘的何处
- 目标是经常被一起使用的pages放在磁盘中也是一起的地方。
空间管理
- 何时将pages读入内存,何时将pages写入磁盘
- 目标是最小化的解决必须从磁盘读取数据这个事
frame
- buffer pool中的一块内存区域
- 相当于page里面的slot
page table
- 记录pages在当前buffer pool中的位置,通过page table 和 page id可以知道在哪个frame中。
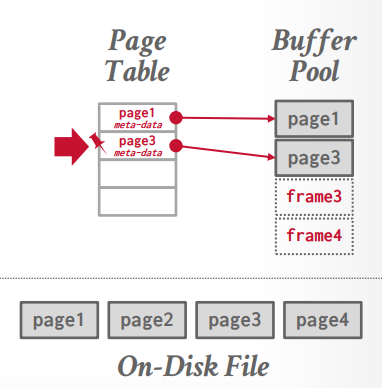
page 里面记录一些元数据
- dirty flag: 记录是否被修改过,也就是常说的”脏数据标记”
- 引用计数器: 记录有多少线程在使用这个数据
- 访问追踪信息
lock and latch
- lock在数据库中指high-level的东西,可以保护数据库,数据表,数据。保护数据库内容不受其他事务影响,在事务持续期间保持,可以回滚。
- latch保护内部的东西,数据结构,内存区域。保护内部数据结构不受其他线程的影响,在操作期间保持,不需要可以回滚。
buffer pool 使用 mmap的问题:
- 事务安全:操作系统完全控制page的写入,刷新,有可能在一个事务没有完成的时候有些数据就已经写入磁盘了。
- IO停顿:DBMS不知道哪些page在内存中,当读取不在内存中的时候触发page fault,操作系统才会从磁盘获取。
- 错误处理:任何访问都可能触发操作系统的中断信号
SIGBUS,而整个DBMS都需要处理它。 - 性能问题
全局策略
- 针对所有的查询或者事务的策略
局部策略
- 针对单个查询或者事务的策略
- 可以对单个优化,虽然对全局可能不好
淘汰策略
淘汰策略有几种算法
- LRU
- Clock:Linux使用的,把所有的page放成一个圈,每个page有一个标志位,如果为0表示没有被使用过,1被使用过,淘汰的时候淘汰0的,再把1改成0.
- LRUK:记录使用的次数k,达到次数才放到缓存里面,淘汰的时候比对两次的时间间隔,间隔长的认为是最近最少使用
- PRIORITY HINTS
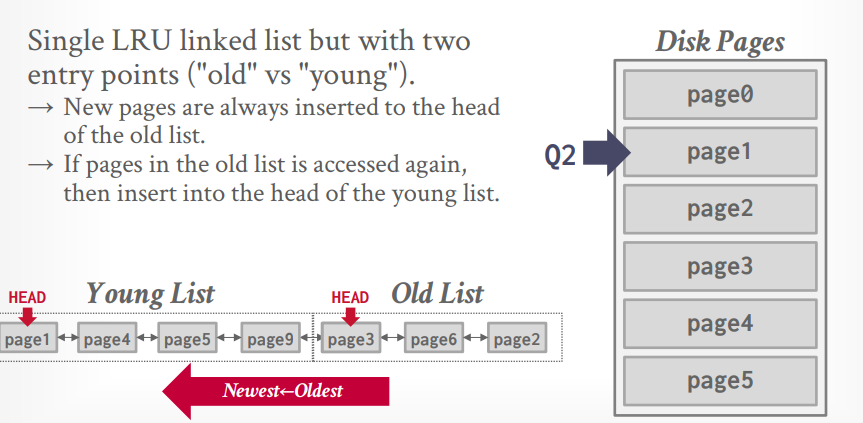
mysql 近似 LRU-k
相当于K=2。有一个LRU List,但是有两个指针,分别表示old list和young list。当数据第一次被访问的时候放到old list中,再次被访问的时候放到young list中。
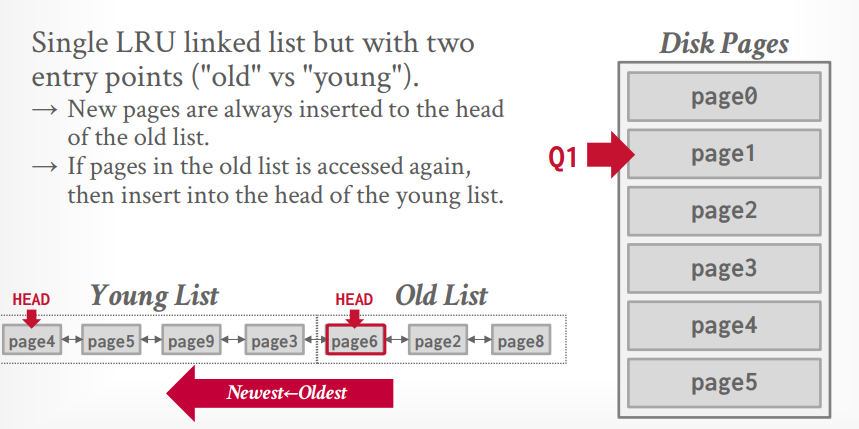
当访问 page1 的时候,需要淘汰掉old list中的page8,其实也是整个LRU中的最后一个元素。然后将page1插入old list。
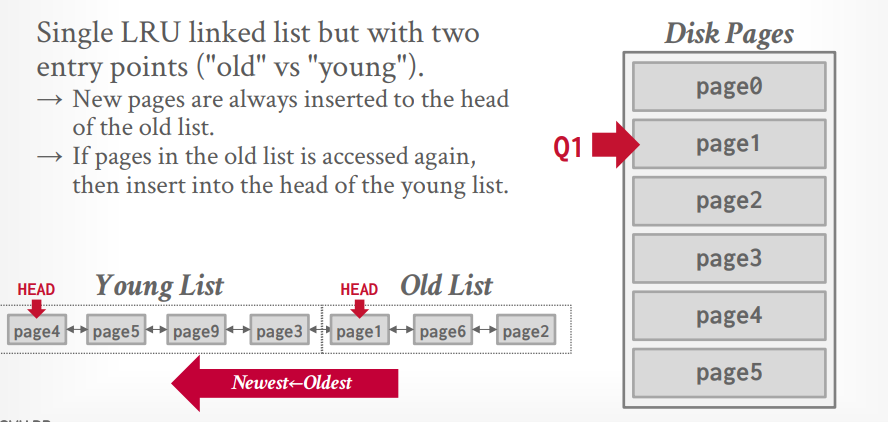
当再次访问 page1 的时候,将page1 插入young list。这个时候young list最后的元素也就进入了old list.
PRIORITY HINTS
比如B+树的根节点具有最高的优先级,所以一直放在内存中。
多buffer pool
- 通过使用多个buffer pool可以根据不同的table放入不同的buffer pool进行不同的优化。也可以通过其他的策略使用多个buffer pool
- 由于有多个buffer pool,减少了锁争抢和锁等待的时间。
- mysql中通过hash确定数据是否在buffer pool,然后通过取余确定在哪个buffer pool
预取数据
- 顺序扫描的时候预先把后面的page取到buffer pool中。这一步mmap也可以实现
- 索引扫描的时候预先把索引中需要用到的后面的page取到buffer pool中。这一步mmap实现不了,这也是数据库自己实现buffer pool的优势。
扫描共享
- 共享扫描到的page内容
- 如果查询1需要扫描page1,page2,page3,page4的内容并且已经扫描到了page3,这个时候page1已经扫描完了被从buffer pool中丢弃了
- 这时候有一个查询2也需要扫描所有的pages,如果从page1开始扫描,就会把page1再次读入buffer pool,但是这样是低效率的,所以可以先共享查询1的page数据,先扫描page3,然后page4,这时候查询1执行完毕,在回头扫描page1,page2。
- mysql不支持
buffer pool bypass
- 单独开辟一个本地内存区域来用,而不是使用buffer pool
- 可以避免操作page table带来的开销(latch锁住的开销)
- 可以避免污染buffer pool
- 适合数据量不大的情况
- mysql5.7不支持
os page cache
- 操作系统的文件缓存,当使用fopen,fread,fwrite的时候会先从操作系统缓存中读取文件内容。
- 只有postgresql使用了这个。
- 通过 direct IO可以不使用这个
- 使用它会导致有两个缓存,buffer pool 和 os page cache。不好控制。
- fsync如果失败以后再次调用也不会生效,因为它会将dirty设置为false
两种写出方案需要做权衡,取舍
- 如果写出dirty flag的数据然后读取新数据,就会产生2次IO。通常会有一个定时任务线程去将dirty flag的数据写入磁盘,写入之前必须要先将操作日志写入磁盘。
- 如果直接读取新数据就只有1次IO,但是这样有可能把下次会用到的数据丢弃。
hash table
hash function
- 最快的是facebook 的 xxhash
hash schema
- liner probe hashing
- 如果要插入的位置有值了,就往下扫描,扫描到空的位置插入
- 删除的时候可以增加一个
墓碑标记,这样就知道这里是有数据的不是空,查找的时候就会继续往下扫描而不会是没找到 - 删除的时候还可以把后面的数据往前移动,但是这样有的数据就不再原来的位置了,就找不到了。因为只会往下扫描不会往上扫描
- robin hood hashing
- 记录
距离数,表示插入的位置和应该插入的位置的距离。从0开始。 - 插入的时候判断距离数,进行
劫富济贫,如果你向下扫描到距离数为3的地方插入,而在距离数为2的地方的数据x,x的距离数比你小,比如是0,1.那么你就占据这里,你插入距离数为2的地方,而将x插入你下面,x的距离数会+1. - 从整体来看,这个方法牺牲了插入的效率,将数据的距离数变得更加平均
- 记录
- cuckoo hashing
- 该方法使用两个或多个
hash table来记录数据,对A进行两次hash,得出两个hash table中的插入位置,随机选择一个进行插入 - 如果选择的插入位置已经有数据了,就选择另一个插入
- 如果两个都有数据了,就占据一个,然后对这个位置上之前的数据B再次hash选择其余位置。
- 该方法使用两个或多个
动态hash table
- chained hashing
- 把所有相同hash的组成一个bucket链表,然后一直往后面增加
- java的hash table默认就是这样的
- extendible hashing
- 对 chained hashing 的扩展
- 有一个slot array,在slot array上有一个 counter, 如果counter = 2,代表看hash以后的数字的前两个bit,slot array就有4个位置,分别是00,01,10,11
- 每个slot指向一个bucket
- hash以后找到前两位对应的slot指向的bucket,将数据放进去,如果满了,放不下了就进行拆分
- 将slot array的counter扩容为3,看前3个bit,slot array变成了8个位置
- 只将这个满了的bucket拆分成2个,其余的不变,重新进行slot的映射
- 再次hash这个值,看前3个bit找到对应的slot,在找到对应的bucket,然后插入进去
- linear hashing
- 对 extendible hashing 的扩展
- 去掉了 conter,因为他每次加1,都会扩容一倍
- 增加了
split point,一开始指向0,然后每次overflow需要拆分的时候就拆分split point指向的那个bucket,然后slot array只扩容一个,这个时候出现第二个hash函数并将split point+1 - 查询的时候如果slot array的位置小于split point,就使用第二个hash函数,因为被拆分了
- 如果大于等于split point,就使用第一个hash函数
tree index
- b tree(1971)
- b+ tree (1973)
- b* tree (1977)
- b link tree (1981)
b+ tree 删除和插入的复杂度都是O(log n), b 是 balance (平衡),paper: the ubiquitous B-tree
B+ tree,保证每个节点都必须是半满的,对于存放在节点中的key数量来说,key数量至少为M/2 - 1个,M为树的高度,key的数量必须小于 M - 1,如果当删除数据以后导致key数量小于M/2 - 1个,就会进行平衡,使他满足M/2 - 1个。
M/2 - 1 ≤ key数量 ≤ M - 1
如果一个中间节点有k个key,那你就会有k+1个非空孩子节点,也就是k+1个指向下方节点的指针。每个节点的内容是一个指针和一个key
叶子节点之间有连接叶子节点的兄弟指针,这个想法来源于b link tree。每个节点的内容是一个数据和一个key,数据可以是一个record id 也可以是一个 tuple
叶子节点的内容,通常key和value是分开存储的,因为搜索的时候并不需要加载value数据
- 元数据
- isleaf 是否是叶子节点
- slots 有多少空闲的slot
- prev 前一个叶子节点的指针
- next 后一个叶子节点的指针
- key数据
- value数据
b tree 和 b+ tree 的区别
- b tree的中间节点也可以存数据,所以key是不重复的
- b+ tree的中间节点没有数据,所有数据都在叶子节点,所以key有可能既存在中间节点也存在叶子节点。会重复
- b tree的性能在并行处理上更差,因为修改以后需要向上传播也需要向下传播修改,这个时候两边都要增加
latch - b+ tree的性能更好,因为只修改叶子节点,所以只需要向上传播,只需要增加一个
latch
b+ tree 插入
- 向下扫描,找到对应的叶子节点
- 如果可以插入就直接插入
- 如果不可以插入,那么从中间分开,变成两个叶子节点,并将中间的key传递给父节点,插入父节点。
- 如果父节点可以插入就直接插入并分出一个指针指向新的叶子节点
- 如果父节点不可以插入重复上述操作3
b+ tree 删除
- 向下扫描,找到对应的叶子节点,这个时候就会增加
latch,因为不知道需不需要合并,操作以后才会释放 - 如果可以删除就直接删除
- 如果删除后导致key数量 <
M/2 - 1,那么就会出发合并,因为不满足key数量啦 - 进行合并的时候删除这个key,然后先查看左右的兄弟节点,是否能直接把数据插入过来,如果可以的话就掠夺一个key过来,然后向上传播
- 如果不能掠夺,那么就合并到兄弟节点,然后向上传播。
b+ tree 标准填充容量大概是67% - 69%,对于一个大小是8kb的page来说,如果高度为4,大约能记录30 0000个键值对。
b+ tree的查找
- 对于<a,b,c>,查找a=5 and b=3也是可以走索引的,但是hash索引就不行,有些数据库还支持b=3的搜索走索引,比如oracle和sql server
b+ tree的节点大小,机械硬盘的大小最好在1M,ssd的大小在10KB
推荐书籍 Modern B-Tree Techniques
对于非唯一索引
- 重复存储,需要注意两个相同的key存储在不同的page中
- value list,key只存储一个,然后所有的value存储成value list
节点内部的搜索
- 线性搜索
- 二分搜索
- interpolation
- 通过数学计算出线性搜索的起点,提升搜索速度
优化方法
- 前缀压缩
- 比后缀截断用的更多
- 存储在page中的key,如果前缀一样的可以提取出来存储一次,然后剩余的数据在存储在key里面
- 后缀截断
- 存储在中间节点的,用来寻路的key,可以只存储前面的部分,如果后面的不需要可以截断
- 更新的时候需要进行维护
- 批量插入
- 如果已经有数据了再建立索引,这个时候不需要从头开始一个个建立,只需要先排序
- 然后建立所有的叶子节点
- 在一层层向上建立中间节点
- 非常普遍的方法,主流数据库都支持
- point willizeing
- 将节点固定在内存中
- 对于page来说,直接存储page指针而不是page id,就不需要请求buffer pool了
b+ tree的重复key,通常使用增加record id的方式,这种方式影响更小。
- 增加
record id,record id是page id+offset用来确定tuple的位置。 - 垂直扩展叶子节点,将数据存在里面
部分索引
- 在创建索引的时候添加where条件,只有符合条件的才会进入索引。
- 查询的时候只有符合条件的才会走索引
覆盖索引
- 在创建索引的时候添加联合索引
- 查询的时候所需数据都在索引中,就不需要在找对应的tuple信息了。
函数索引
- 创建索引的时候添加函数信息,比如 MONTH(date), 只对月份创建索引
- 查询的时候 MONTH(date) 就会走索引了,而date就不会走索引了
- 如果创建的时候只创建 date 索引,那么查询的时候 MONTH(date) 就不会走索引
trie index(前缀树)
- 把每个单词建立成树,一层放一个字母
radix tree
- trie index的升级版
- 对于trie index进行了横向的压缩和纵向的压缩
过滤器
Bloom filter
Counting Bloom filter
Cuckoo filter
Succinct Range Filter
索引并发控制
并发控制
- 逻辑正确性
- 获取id = 5的数据,能正确返回id = 5的数据
- 物理正确性
- 保护page指针指向正确的page数据,不会触发 segfualt
latch 模式
- 读模式
- 可以多个线程读取
- 写模式
- 只有一个线程可以写模式,这个时候其他线程不能读取也不能写入
latch
- blocking os mutex
- std::mutex m;
- m.lock();
- m.unlock();
- test and set spin latch
- std::atomic_flag latch
- while(latch.test_and_set()){} // 如果获取到锁就跳出循环
- read - write latch
- 读锁,获取的时候线程数队列,等待队列,如果能获取就进入线程数队列,不能就进入等待队列
- 写锁,线程数队列,等待队列,如果能获取就进入线程队列,不能就进入等待队列
- 如果有一个写锁在等待队列,这个时候在获取读锁也放入等待队列,要不然一直读,写锁就获取不到了
latch crabbing/coupling
- 使用栈保存latchs
- 每个节点都需要一个latch
- 如果当前节点是
安全的,就可以释放上层的所有latchs 安全:指操作的时候不会触发拆分和合并。通常read latch都是安全的,write latch 插入的时候如果有足够的空间就是安全的,删除的时候删除以后不会合并就是安全的
乐观锁
- 乐观的认为不需要
合并和拆分。 - 所有的操作都先获取read latch,如果发现需要
合并和拆分,再次从头获取write latch来一遍 - 优点是所有操作都是read latch,可以更好的支持并发
- 缺点是遇到
合并和拆分会再来一遍,而且如果连续的插入都需要合并,就会退化成每个都获取write latch。
叶子节点扫描
- 叶子节点的扫描可能会触发
死锁,比如两个线程 - 线程1执行读取,读取到了叶子节点1
- 线程2执行写入,在叶子节点2处获取了write latch
- 这个时候线程1在叶子节点1里面没有找到数据,所以要扫描叶子节点2,但是获取read latch的时候卡主了,需要等待
- 而线程2有可能也需要访问叶子节点1,同样等待,产生死锁
- 这个时候可以设置等待时间,超过等待时间则
自杀,然后重头再来,假如线程1自杀,然后再来一遍,这个时候线程2就可以获取到latch,然后执行下去了
overflow处理
- 来源于b link tree的优化
- 当需要拆分的时候,先拆分叶子节点,这个时候不向
父结点传播,因为修改父结点需要从头开始获取write latch。 - 这个时候标记父结点需要插入一个key
- 等待下一个修改操作到父结点的时候,获取write latch,然后执行这个插入操作。
排序和聚合
排序的好处
- 有序的数据创建索引的时候可以快速的先创建叶子节点,在创建父结点
- 有序的数据在
order by分组的时候可以更快的分组 - 有序的数据在
distinct去重的时候可以更快的去重
排序算法
- 在内存中
- 可以使用各种算法
- 但是有的数据内存放不下,就需要在磁盘上排序
- 需要先知道
可以用内存的大小,这样就知道该内存排序还是磁盘排序
- 在磁盘上
- 快排会产生更多的随机IO,会更慢
- 使用
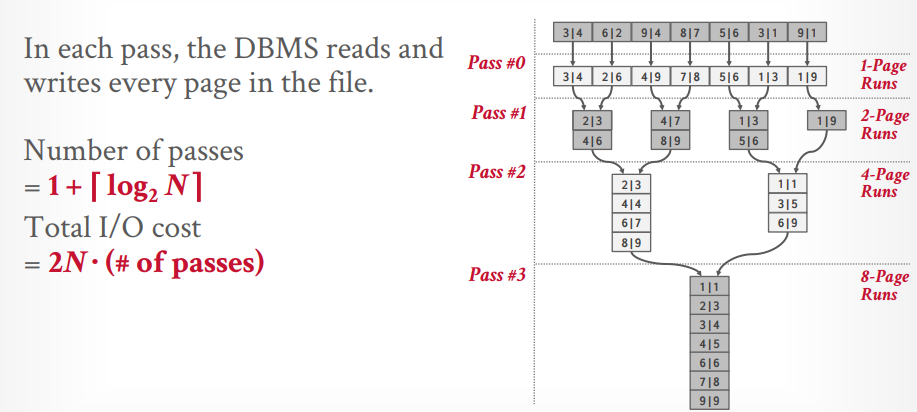
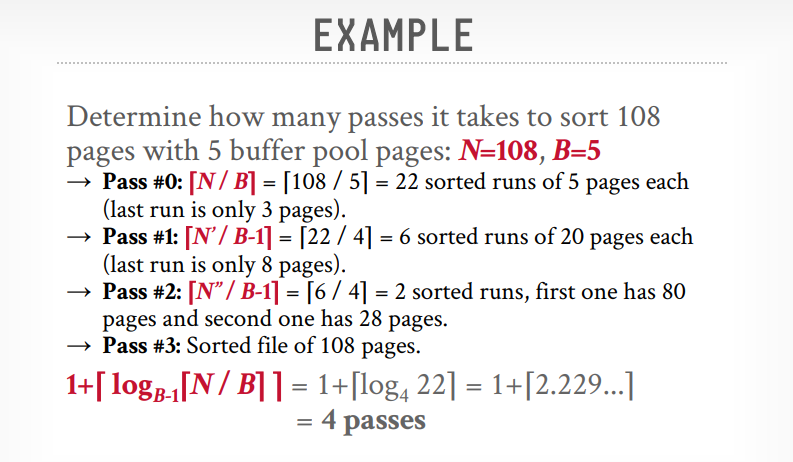
归并排序更好,分成多个runs,对每个run排序,然后在通过二路归并生成总的排序,这可以减少随机IO - 外部归并排序,需要3个
buffer pool,2个用来排序run,1个用来二路归并。 - 次数:1 + log(n)
- 总的IO数: 2N * (# of passes)
- 可以通过
预取来优化,当对page排序的时候,另外一个线程先取出下次要排序的page。
聚簇索引
- 排序的字段如果建立了聚簇索引,就不需要在排序了,直接可以走聚簇索引拿到排序好的数据
top-N heap sort
比如下面的sql
1 | select * from a |
那么首先创建一个大小为2的有序数组或优先级队列之类的。假设我们的数据是
1 | {id:3, name: xxx}, {id:4, name:xxx}, {id:5, name:xxx}, {id:2, name:xxx} |
这个时候优先级队列是空的
1 | {} |
然后扫描id为3的数据,放入优先级队列,再扫描id为4的数据,放入优先级队列。这个时候队列数据是
1 | {id:3, name: xxx}, {id:4, name:xxx} |
接下来扫描id5的数据,放不进优先级队列,因为id大,最后扫描id2的数据,放入优先级队列,队列就排好序了
1 | {id:2, name:xxx},{id:3, name: xxx} |
external merge sort
当数据太大,无法放在内存中的时候,需要借助外部的文件来进行排序
- 先排序小块的数据,然后写入文件
- 在将文件的内容合并
early materialization
- 将数据放在排序的数据里面,排序以后可以直接返回数据,行数据库一般用这个
late materialization
- 排序的数据里存的是tuple id or record id, 排序以后再根据id查询数据返回
优化方法
- 增加buffer pool在排序中可用的内存,当一个输出page进行写入IO的时候,CPU处理另一个输出page。
- 多线程,一个线程进行page排序,另外一个线程进行二路归并。
聚合
两个实现方法
- 排序
- 哈希,通常哈希更好,因为都在内存中
group by 和 distinct 本身执行的时候也是需要排序的
hash
- 分区
- 可以顺序扫描每个page
- 对于每个page的key进行hash,然后分区,hash相同的说明key相同,分到一个区里面
- 这个时候不管distinct还是group by都可以方便的执行了
- 重新哈希
- 对于分区以后的数据再次进行hash
- 再次hash的数据放入一个临时的hash table
- 处理完一个临时的hash table就把结果写入结果集
排序的聚合实现,以distinct为例:
- 先执行where条件筛选出符合的
tuple - 再次根据列筛选出符合的列
- 对于需要排序的列进行排序
- 顺序扫描排序结果,实现去重,并生成最终结果
哈希的聚合实现,以distinct为例:
- 先执行where条件筛选出符合的
tuple - 再次根据列筛选出符合的列
- 对于需要排序的列进行hash,先分区,再重新哈希。
- 重新哈希的时候生成最终结果。
重新哈希的时候
- avg的话,需要再临时hash table里面存储key的数量和要求平均数的总数。在生成最终结果的时候进行计算平均数
- min的话,临时hash table里面存入最小数,生成最终结果直接取
- max同上
- sum同上
- count同上
join算法
join输出:数据
- 在join的时候把两张表的数据全部输出给下一个处理器,这包括了表的所有字段
- 好处是,接下来的处理不需要再拿其他字段了,所有字段都有了
- 坏处是,Join的时候数据量很大,因为有所有字段
- 可以进行优化,在join的时候只获取需要的字段
join输出:record id
- 在join的时候,只获取on的字段和record id,然后需要其他字段的时候在通过 record id去获取,这个很适合列存储数据库
- 第一个使用的是
vertica列存储数据库,不过现在已经不用了
如何判断两个join算法的好坏?
- 通过IO来计算
- 假设左表R有M个page,m个tuple
- 右表S有N个page,n个tuple
join算法
- Nested Loop Join
- simple/stupid
- block
- index
- Sort-Merge Join
- Hash Join
- simple
- GRACE(Externally partitioned)
- Hybird
Simple Nested Loop Join
- 通过两层for循环,然后符合条件的进行输出
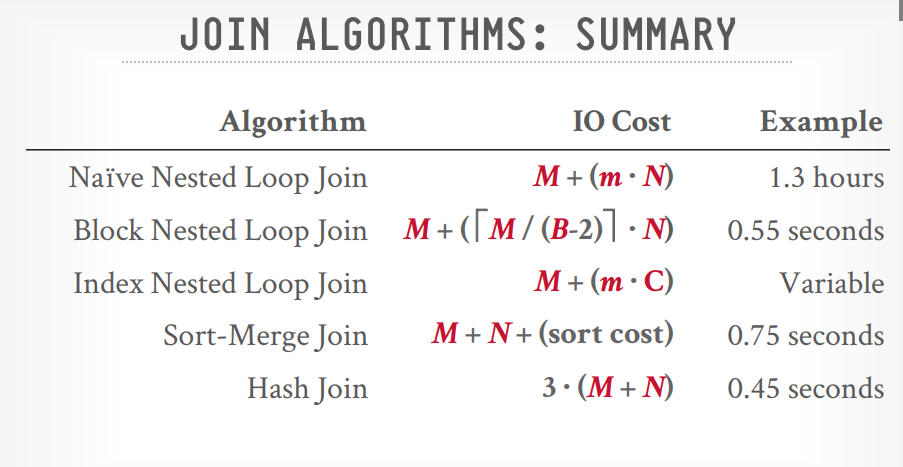
- IO计算:因为外层循环要读取 M 个 page,循环的tuple 是 m,内存循环要读取N个page,所以内层循环的IO数是 m * N,总的IO:M + (m * N)
- 假设 M = 1000, m = 10 0000, N = 500, n = 40000, 总的IO = 1000 + (10 0000 * 500) = 5000 1000
- 假设 SSD 执行速度 0.1ms 一次IO,大概需要1.3个小时
- 如果N是左表,那么总IO = 500 + (4000 * 1000) = 400 0500,大概需要1.1个小时
- 所以如果左表是小表,性能更好
1 | for (Tuple r: R) { |
Block Nested Loop Join
- 对simple的优化,不在循环tuple,而是循环page,将page打包成block,然后循环block
- 这样的话对于内层循环来说IO就是 M * N,总的IO就是 M + (M * N)
- 假设 M = 1000, m = 10 0000, N = 500, n = 40000, 总的IO = 1000 + (1000 * 500) = 50 1000
- 假设 SSD 执行速度 0.1ms 一次IO,大概需要50s
1 | // 这个看上去循环多了,不过因为预先读取了两个block才循环,所以循环是在内存中,IO次数少了 |
Block Nested Loop Join优化
- 假设buffer pool容量是B,可以先获取B - 2个左表的Block,剩下2个位置,一个是获取右表的 Block 的,一个是输出的。
- 这样的话总的IO次数:M + ([M/(B-2)] * N), M/(B - 2)向上取整
- 最好的情况是 B > M + 2,代表一次性能获取所有的左表的Block
- 这样总的IO就变成 M + N
- 假设 M = 1000, m = 10 0000, N = 500, n = 40000, 总的IO = 1000 + 500 = 1500
- 假设 SSD 执行速度 0.1ms 一次IO,大概需要0.15s
Index Nested Loop Join
假设s.id有索引,那么就可以根据索引进行匹配,加快速度.
- 总的成本将是
M + (m * C)C是索引需要的时间
1 | for (Tuple r: R) { |
Sort Merge Join
- Sort:先对要join的字段进行排序
- Merge: 用两个指针进行匹配,如果数据匹配就输出,因为数据已经排序好了,所以只需要扫描一次就行了
- 这样的话总IO就是 sort io + merge io, merge io = M + N, sort io看具体的排序算法
- 最好的情况是要join的key本身已经是有序的了,那么只需要merge io = M + N,比如有索引,比如查询的时候使用了order by
1 | sort R,S on join keys |
Hash Join
- Build: 先对左表要join的key进行hash,构建一个hash table
- probe: 在对右表要join的key进行hash, hash相同的会放入同一个 bucket,也就完成了匹配
1 | for (Tuple r: R) { |
Hash Join优化
- 可以添加
布隆过滤器来优化,这样的话在probe阶段,对右表的key, hash以后先查询布隆过滤器,如果false,就不需要在放入hash table去匹配了 - 如果true在去hash table里面匹配数据完成输出
Grace Hash Join
- 在 hash join中,只构建一个hash table来存储左表数据,右表的hash完成直接匹配
- Grace hash join中,构建两个hash table,然后进行 nested loop join
- 总的IO: 3(M + N),大约0.45s
hash 几乎总是好的。
排序是好的情况有两种
- non-uniform数据,排序更好
- 对于需要排序的数据,比如order by,排序更好
query exec
processing Method
- Iterator Model: 大多数数据库使用的
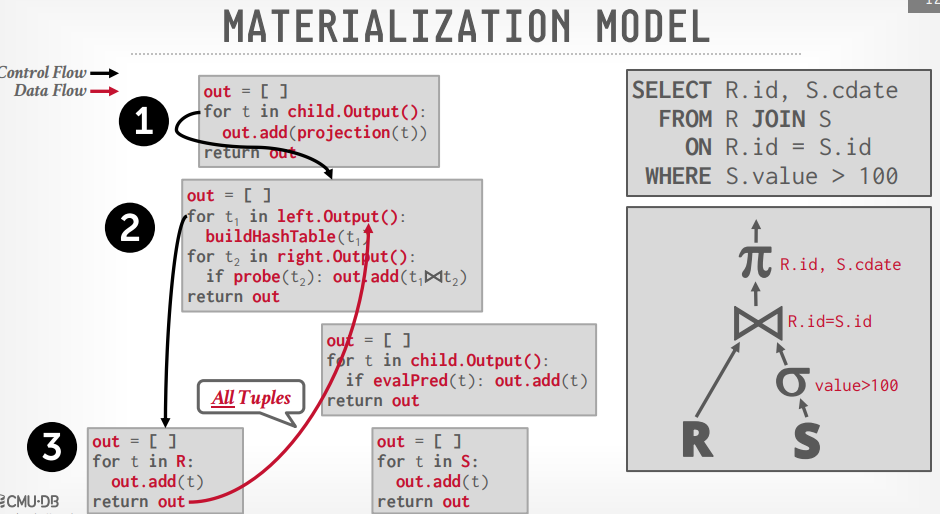
- Materialization Model:Iterator Model的一个特定版本,用在内存型数据库
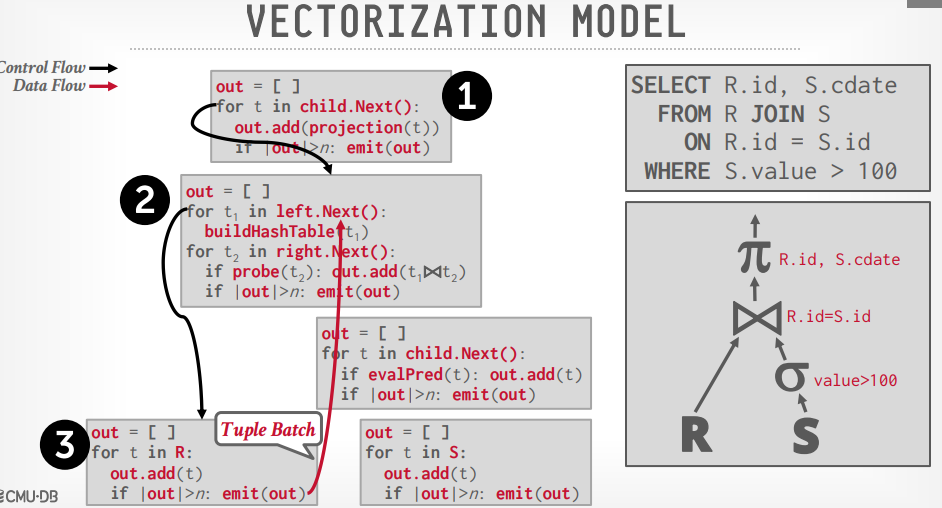
- Vectorized/ Batch Model:Iterator Model差不多,要传入一大堆东西, 分析型用的多
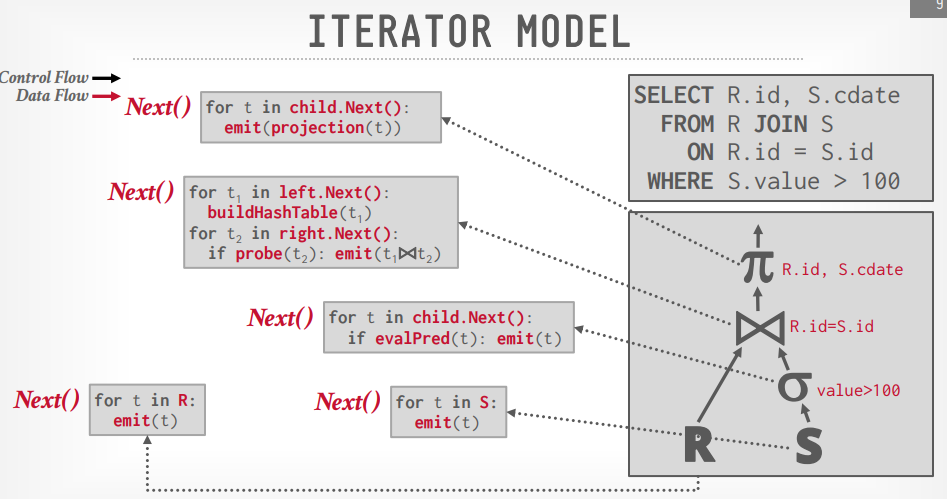
Iterator Model
- 像java的stream, 流的方式执行
- 先构建执行树,上层的通过
next方法调用下层的方法并接收返回值
Materalization Model
- 去掉了
next方法,使用了output方法,一次输出所有数据给上层
Vectorized Model
- 使用
next方法,但是一次性返回一堆 tuples, 数量取决于 Buffer pool 大小 - 使用OLAP,大多数的数仓使用这个
Access Method
- 顺序扫描
- 索引扫描
- 多索引扫描
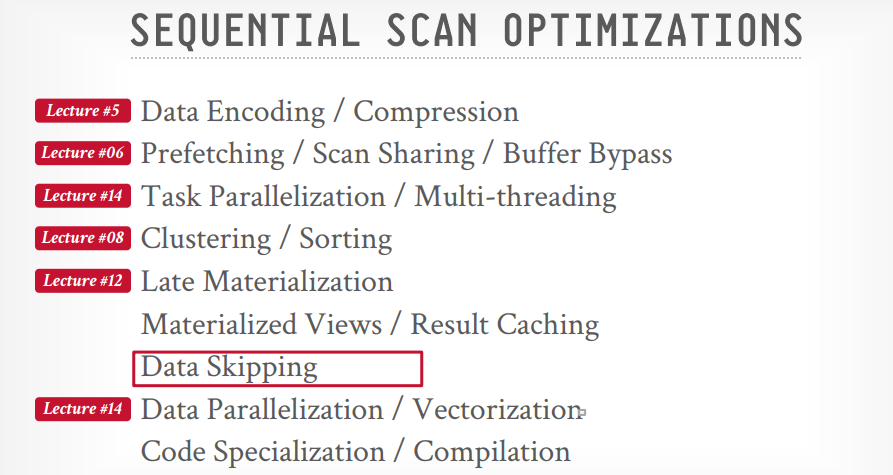
顺序扫描的优化
多索引扫描
- 对多个索引同时扫描
- 将扫描结果取交集或并集等
- 例如 DB2 Multi index scan,PostgreSQL bitmap scan,MySQL Index Merge scan
Zone Maps
- 通过在page上面增加一个元数据,存储min,max,avg,count,sum信息
- 当查询的时候比如where val > 600,先查询 Zone Maps,如果发现max < 600,那么就不用在扫描这个page了
- 缺点是插入,更新,删除的时候还需要更新Zone Maps信息,所以适用于 OLAP数据库
late materialization
- 已经不需要的字段就不在往上层传了
Expression Evaulate
- 先建立where条件的 Expression tree,中间节点是操作符,比如
=,>,<,and,or等。子节点是两边的值 - 对于每个tuple执行这个表达式
- 好的数据库会对表达式进行优化,比如优化成常量,像where 1 = 1优化成 trues
Process Models
- Process per DBMS Worker
- Process Model
- Thread per DBMS Worker
- Embedded DBMS
Process per DBMS Worker
- 每个进程是一个worker,负责执行任务
- 通过
共享内存进行buffer pool的通信,要不然每个进程都会有一个buffer pool。 - 老得数据库大部分使用的这个,因为当时没有统一的线程API,像DB2,oracle,postgraSQL
Process Model
- 和 Process per DBMS Worker一样
- 但是增加了 worker pool,有多个worker进行调度处理
- 像DB2,postgraSQL(2015)
Thread per DBMS Worker
- 一个进程,多个线程执行,由数据库自己控制线程。
- 现在的数据库几乎都使用这种,像DB2, MSSQL, MySQL, Oracle(2014)
scheduling
- 将查询分解为多少个任务?
- 它使用多少个CPU核心?
- 哪个CPU执行哪个任务?
- 任务输出到哪里?
Intra query parallelism
- Intra operator(水平)
- Inter operator(垂直)
- Bushy(上面两种的组合)
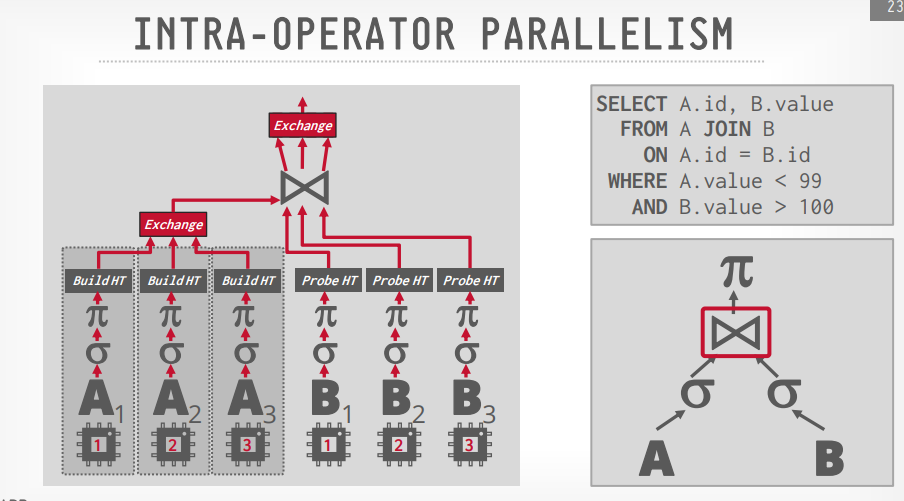
Intra operator(水平)
- 通过水平拆分数据,由多个线程执行,比如3个线程,一个线程处理一个page,以此类推
- 处理完成以后通过
exchange operator来进行合并,拆分也是通过它。
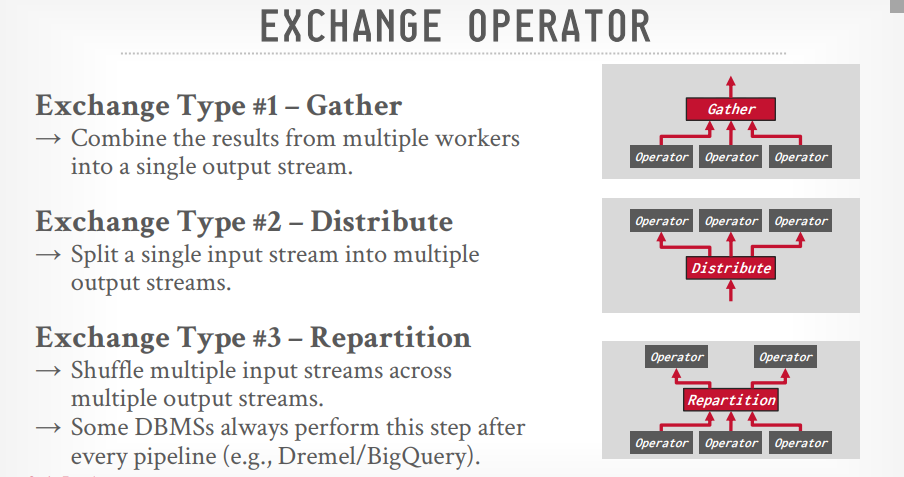
Exchange operator
- Gather:从多个线程的结果合并成一个输出流,PostgreSQL用这个
- Repartition: 重新组织多个输入流到多个输出流的数据,像group by,BigQuery用这个
- Distribute: 拆分一个输入流到多个输出流
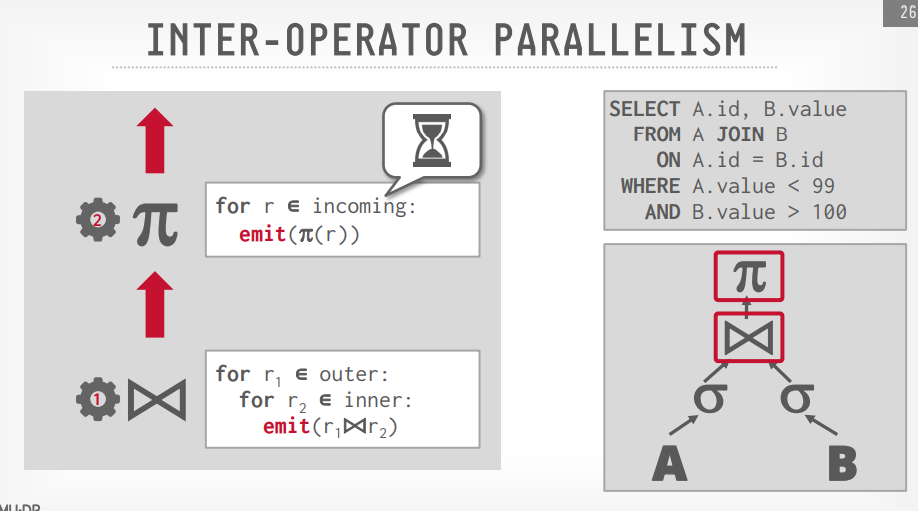
Inter operator(垂直)
- 重叠的操作从一个阶段到下一个阶段的pipeline数据,没有具体化
- workers同时执行多个operators从一个查询计划的不同部分
- 也需要用到exchange operator
- Spark,Kafka常用这个
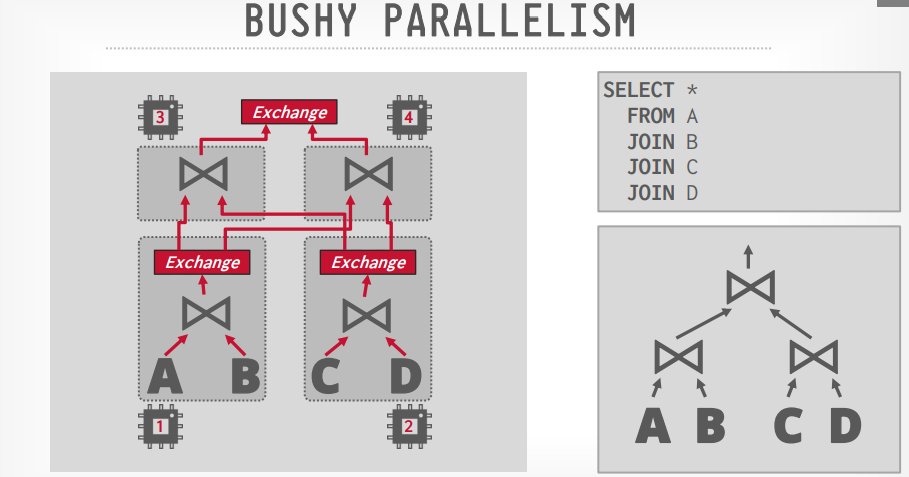
Bushy
查询计划
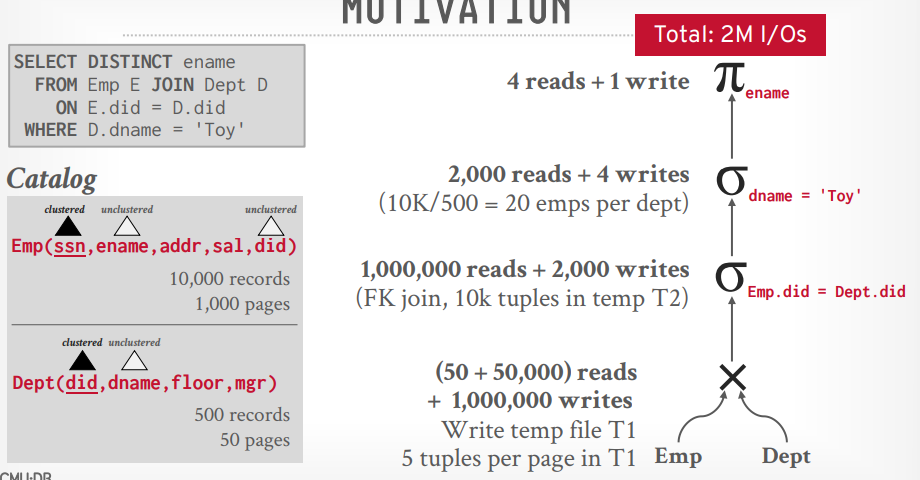
假设有以下sql,其中Emp表有10000个records, 1000个pages, Dept表有500个records, 50个pages
1 | select distinct ename from Emp E join Dept D on E.did = D.did where D.dname = 'Toy' |
数据库将构建以下关系代数的树
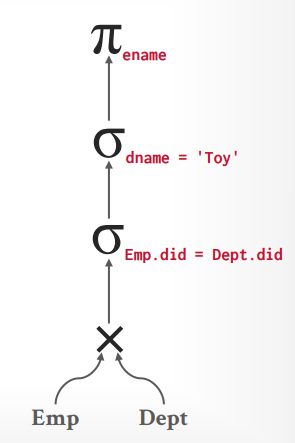
按照这个关系代数的树来执行的话,总共需要 2M的IO
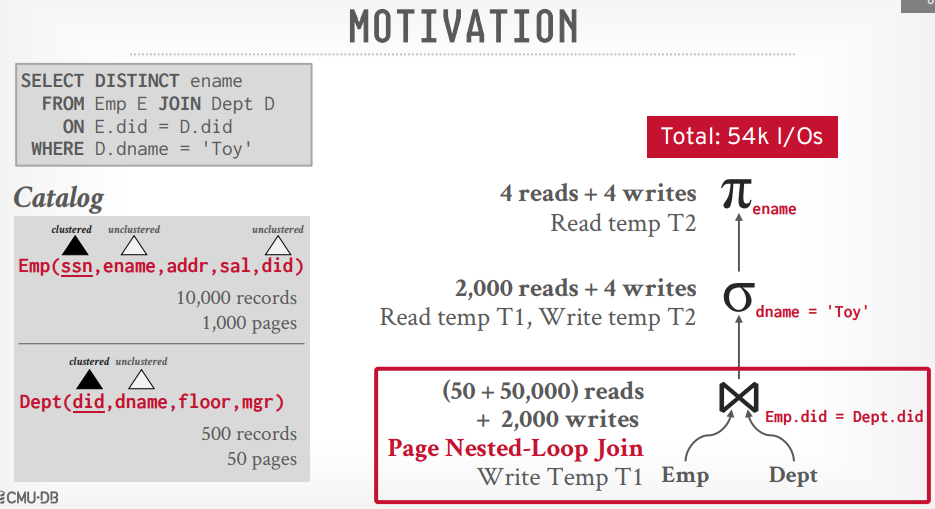
接下来将笛卡尔积的代数换成join的代数,就算使用Nested Loop Join,也能获得54K的IO
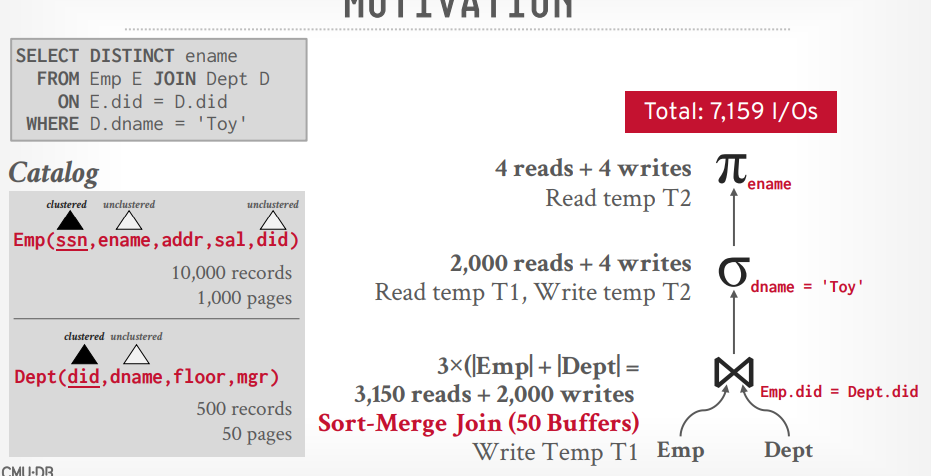
如果将Join算法替换成Sort-Merge Join,则可以将IO降低到7159
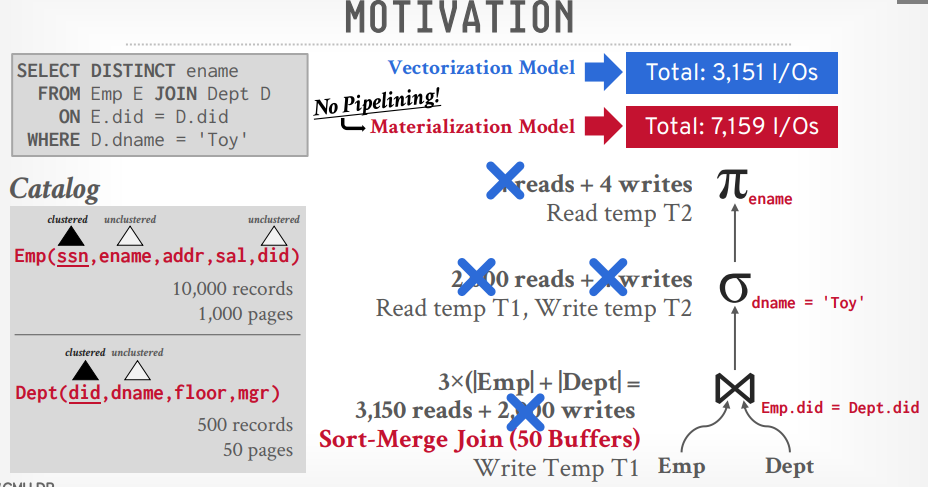
这个算法是基于Materialization Model的,所以每次还要写入文件,再读取。如果优化成Veectorization Model,减少重复的写入和读取,可以达到3151的IO
wraning:
- 这非常难!
- Andy对这部分知道的是最少得
- 如果搞好了,很挣钱
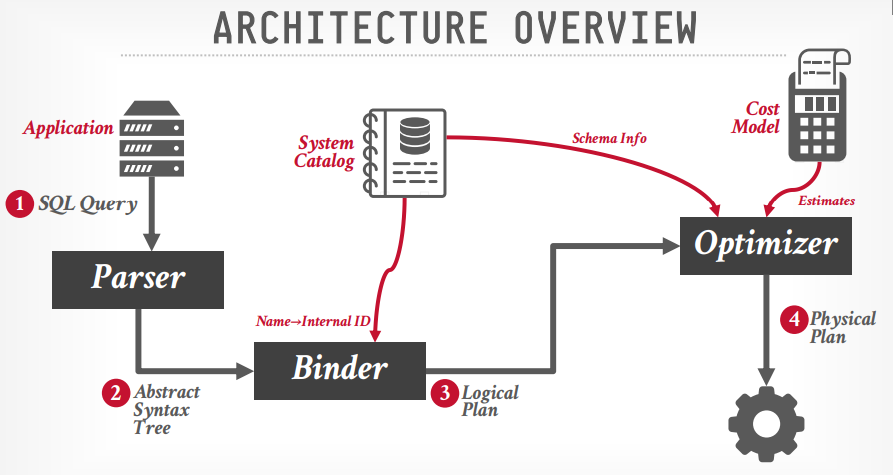
查询结构
- SQL rewrite (可选):重写sql语句,对sql语句进行优化
- Parser: 解析SQL查询,构建语法树
- Binder: 查询catalog信息,并将表名等信息替换成内部标识,生成
逻辑查询计划 - Tree rewrite (可选):重写树结构,包括关系代数等
- Optimizer: 调用成本模型,预估成本,选择合适的执行计划,生成
物理执行计划
生成物理执行计划的时候,可能有多个执行路径,在短时间内可能无法从全部的路径中选出最佳的。
查询优化
查询优化是很难的,有些数据库的查询优化做的很差,DB2曾引入机器学习做查询优化,效果并不好,被吐糟安装DB2要做的第一件事就是关掉这个功能
查询优化
- 静态规则/条件触发
- 根据静态的规则,或者触发了某一个条件来重写查询,移除低效率的东西
- 需要检查catalog查看信息,而不需要去检查数据
- 成本原则
- 使用模型预估查询成本
- 估计出多个查询计划,选择其中成本最低的一个
静态规则/条件触发
关系代数等价
- 一个查询语句可以用多个关系代数来表示
- 可以选择其中代价更小的那个关系代数
- 这个被叫做
query rewriting属于上面的Tree rewrite阶段 - 比如用join代替笛卡尔积
predicate pushdown
- 比如select a.name,b.code from a join b where a.name = ‘abc’
- 可以先join在where,也可以先where 再 join
- 显然先where更好,把where放到join的下层执行
- 还有可以再where之后只获取需要的列,其余不需要的列就不再往上层传递了
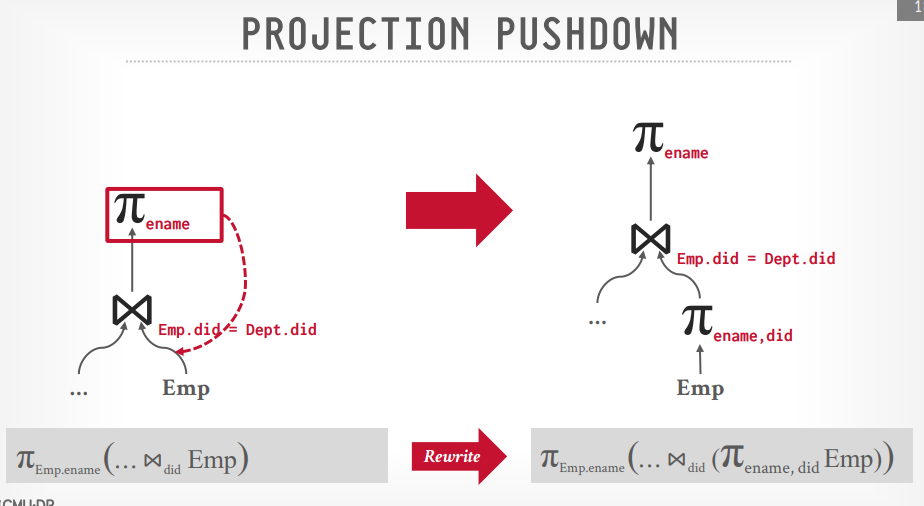
projection pushdown
- 比如select a.name,b.code from a join b on a.id = b.aid
- 可以在扫描a表的时候进行投影,获取id和name传到join节点处理,而不是全部字段传过去,b表同样
语句重写
- 比如select * from a where 1 = 0; 那么不会返回任何数据。
- select * from a where 1 = 1 会返回所有数据,重写成select * from a
成本原则
mongoDB没有使用成本预测模型,而是执行所有的查询计划,哪个最先返回就用哪个
最初是IBM提出的。枚举不同的查询计划,并估算他们的成本,在检查完所有的计划或者超时后,选择其中成本最低的一个。
- single relation
- multiple relation
- nested sub-queries
single relation
- 单表是比较简单的,比如根据后面的statistics决定走哪个索引更好
- 可以顺序扫描
- 可以二分搜索
- 可以走索引
对于单表查询来说,一般会使用启发式规则,他来判断哪些where条件能筛掉更多的数据,就先进行哪个where。
sargable (search argument able):他会比较不同的索引,比如这个索引合适,那么就会使用它,比如id=1的,那么就会使用主键索引
multiple relation
- 有两种方法,第一种是自底向上
- 还有是自顶向下
system R 优化
- 这是一个自底向上的multiple relation
- 将查询分成block并为每个block生成逻辑运算
- 为每个逻辑运算生成物理运算并实现它
- 组合所有的join算法和访问路径
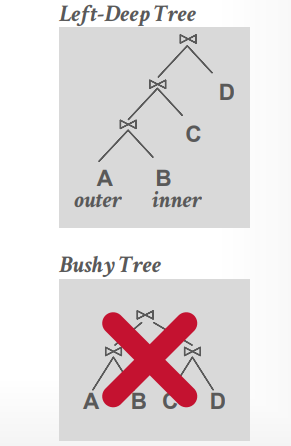
- 生成一个left deep的树
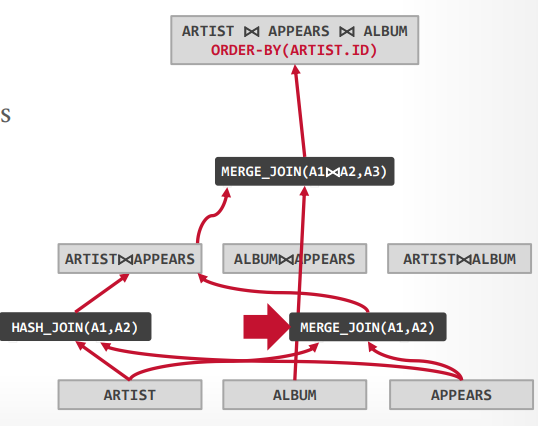
比如有下面的SQL,ALBUM.NAME 字段有索引
1 | SELECT ARTIST.NAME |
进行第一步,可以得到三个表的扫描方法
- ARTIST:顺序扫描
- APPEARS:顺序扫描
- ALBUM:索引扫描
接下来组合不同的join算法,我们可以先连接ARTIST和APPEARS表,也可以先连接APPEARS和ALBUM表,或者ALBUM和ARTIST表,并且可以使用hash join 或者 merge join
最终为每个可能选择成本最低的join
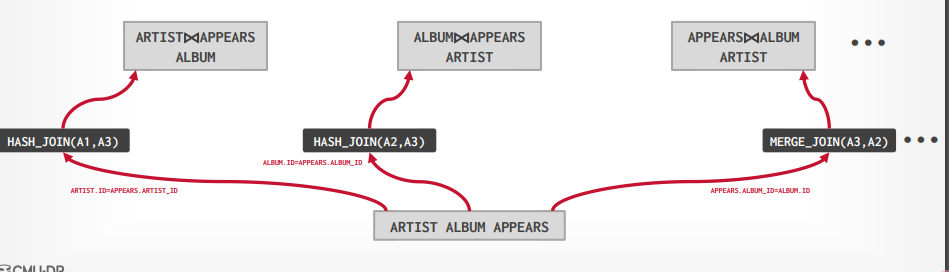
接下来为每个可能去join其他表,来完成最终的三个表join,这个时候还是有hash join和merge join,选择最适合的join方法,就会产生三个路径
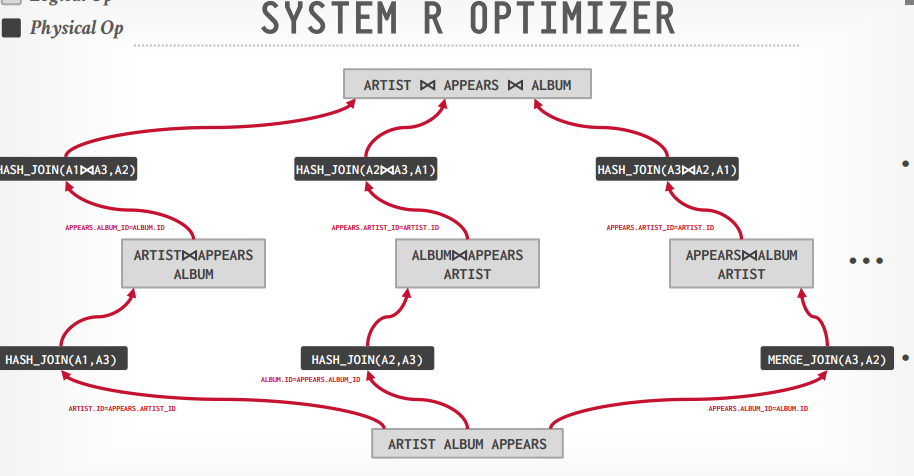
在从这三个中选择出成本最低的一个路径作为最终的路径
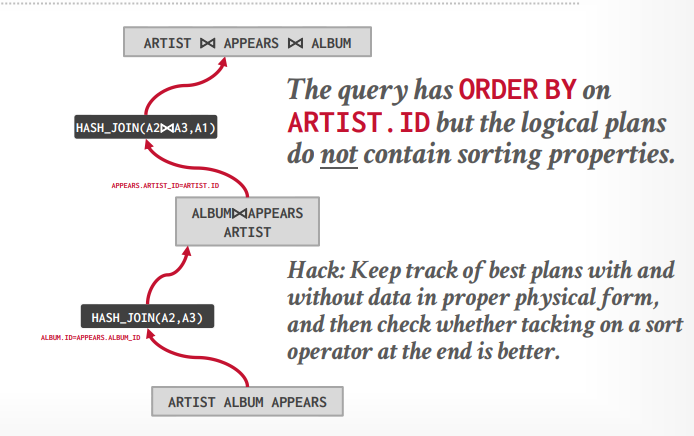
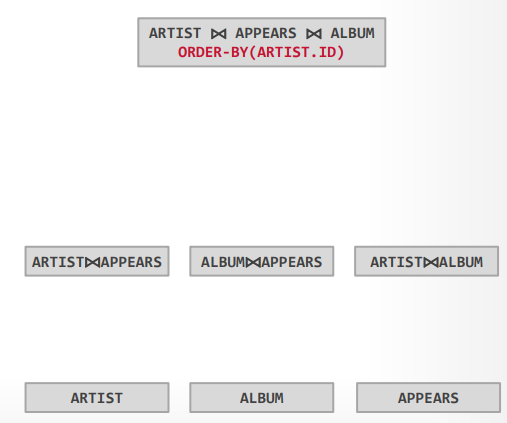
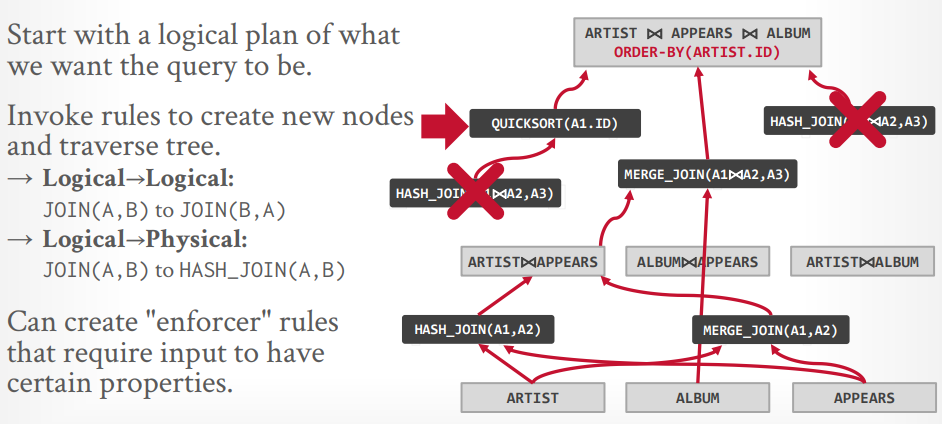
自顶向下优化
首先生成逻辑节点,最底下是三个表,最上面是三个表join并且order by,中间是两个表join
接下来先生成三个表的一个物理操作,因为需要order by,所以可以认为merge join更好。
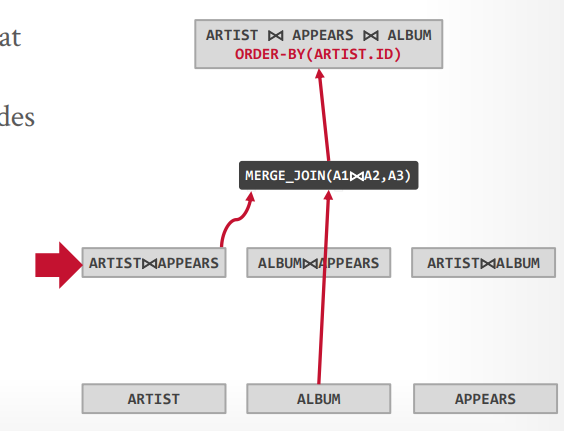
接下来两个表的物理操作,可以选择hash join或这merge join,因为要排序,可以认为merge join更好
最后在探测其他的路径,比如最上层还可能有hash join,或者先hash join,在排序,但是这些都没有merge join的成本低,所以在探测到以后就可以Pass掉了
子查询优化
- 重写去掉and/or来把他们变成同一个层级
比如以下SQL
1 | SELECT name FROM sailors AS S |
可以被重写为
1 | SELECT name |
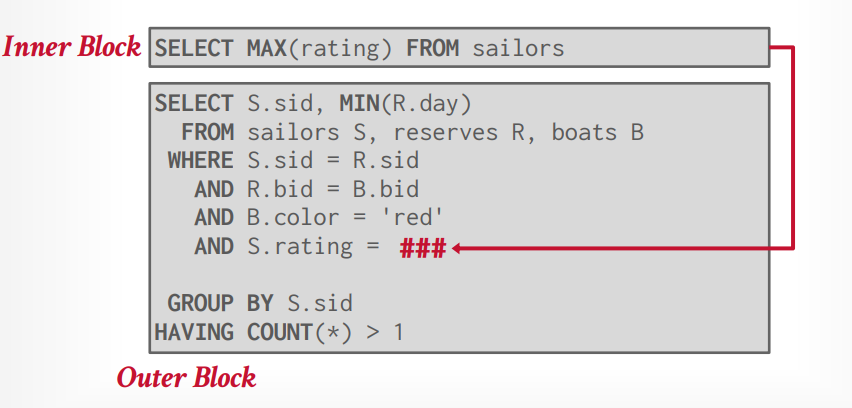
- 分解子查询并将结果存储在临时表中,比如使用CTE,避免每个tuple都需要执行子查询
比如下面的SQL
1 | SELECT S.sid, MIN(R.day) |
可以将子查询提取出来变成
catalog会记录一些成本信息,不同的DBMS有不同的更新策略,也可以手动更新,这被叫做statistics
- PostgreSQL/SQLite : ANALYZE
- Oracle/ Mysql: ANALYZE TABLE
- SQL server: UPDATE STATISTICS
- DB2: RUNSTATS
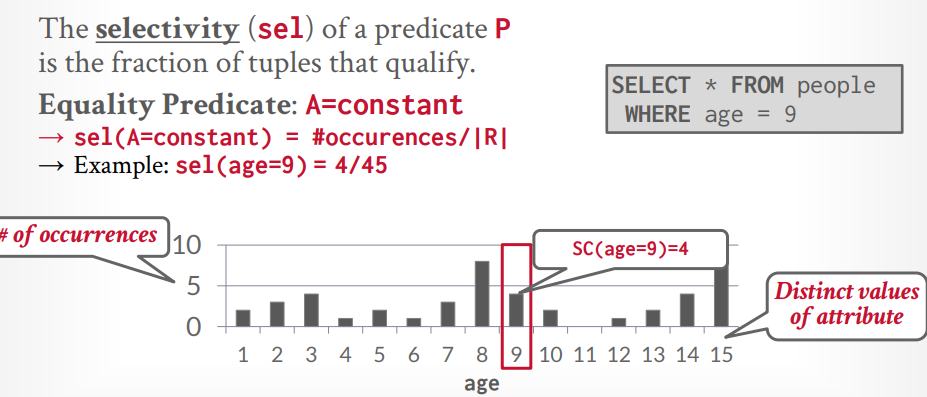
statistics: 维护着下面的信息
- counter: 表中的tuple数量
- V(A,R): R表中的A字段的去重数量
- SC(A,R):
选择基数SC是 counter / V(A,R) 的值
选择率:有了上面的数据,就可以计算出要查询的数据的分布比例了。这里就是求概率。
- 比如查询主键 id = 1的数据,当前有数据5条,那么counter = 5,V(A,R) = 5, SC(A,R) = 1, 选择率 = 1/5
- 比如范围查询 id > 2的数据,当前有数据5条,那么counter = 5, V(A,R) = 5, SC(A,R) = 1, 选择率 = (Max - A) / (Max - Min) = 5-2/5-1 = 3/4,显然这事错误的预测,但是数据库就是这样
- 比如not查询 id <> 1的数据,当前有数据5条,那么选择率 = 1 - (id = 1的选择率) = 1 - 1/5 = 4/5
- 比如多个条件 and, 那么取交集,也就是 两个选择率 相乘 = sel(AB),这种计算同样不太准确,比如有一个
汽车表,有make字段代表生产商,model代表型号,我们知道model = “帕萨特”,make 一定是大众。按照我们的算法 假设make 有10个,选择率就是1/10, model 100个,选择率就是 1/100,总的选择率就是 1/1000,但是帕萨特一定是大众的,所以真实选择率其实是1/100。有些数据库可以设置字段关联来解决这个问题,比如oracle等,mysql和postgresql不行。 - 比如多个条件 or, 那么取并集,也就是两个选择率相加 = sel(A) + sel(B) - sel(AB)
直方图的存储,由于存储所有信息的直方图可能很占空间,可以选择稀疏存储,合并一些数据,这样会牺牲一些准确率,但是节省空间。
除了直方图以外,有些数据库还会使用抽样检查,花费一些时间进行抽样,然后根据样本来进行预测选择率。
并发控制原理
原子性:事务的每个操作都是原子的,要么全成功,要么全失败,通过undo redo log实现
一致性:保证事务执行前和执行后是一致的,中间可以临时不一致,但最终要一致。通过raft等共识协议实现
隔离性:保证事务的隔离性,每个事务都是独立运行的,并发的时候通过并发控制协议来保证交错执行,通过latch保证正确性。通过并发控制实现
持久性:事务提交后数据持久保存了,通过undo redo log实现
当转账的时候,事务被突然的中止,或者断电,该怎么做?
- Logging
- shadow paging
Logging
- 记录所有的操作,使得事务中止或者故障后可以undo 操作。
- 在磁盘和内存中维护 undo records
- 就像飞机上的黑盒子一样
shadow paging
- 将数据复制到一个副本中进行事务更新,如果成功了,将副本作为新的数据库,如果没成功也不影响当前的数据库
- 起源于System R
- CouchDB和LMDB使用这个方法
并发控制协议:
- 悲观的:两阶段提交
- 乐观的:时间戳
顺序执行:
- 顺序执行每个事务,保证事务的最终一致性
交错执行:
- 如果能达到顺序执行的结果,那么就是正确的执行 schedle
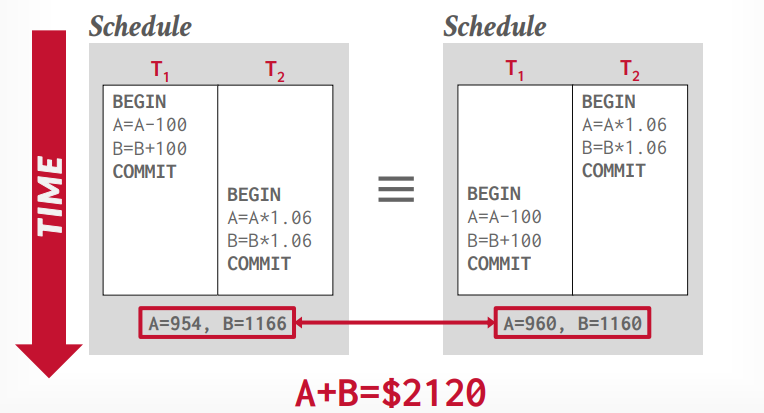
假设a,b账户都有1000,那么经过t1事务和t2事务执行以后,总的结果应该不变,对于数据库来说,哪个事务先执行都可以,如果想控制事务执行顺序,应该由应用层控制。
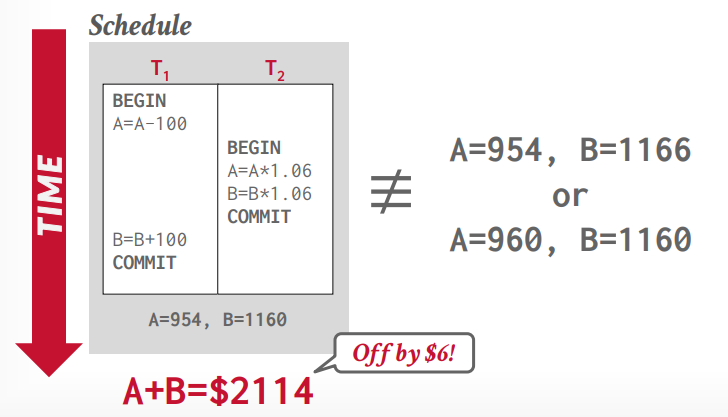
如果交错执行的结果和顺序执行的结果不一样,就是错误的
总共会出现三种冲突
- 读写冲突
- 写读冲突
- 写写冲突
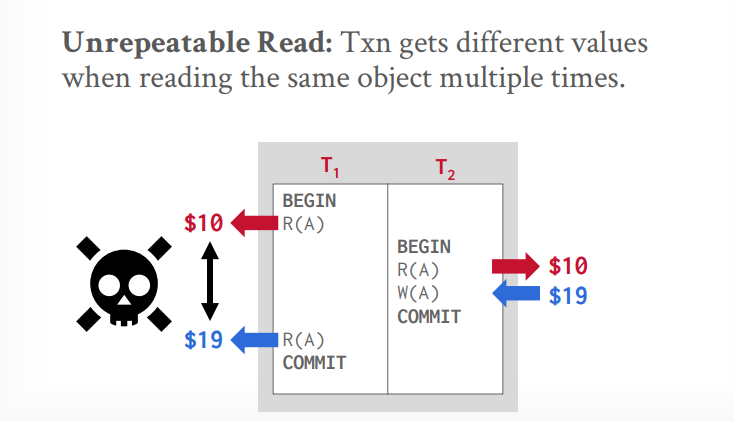
读写冲突(不可重复读):当读第一次的时候,值被其他事务改变了,再次读的时候,值就和第一次读的时候不一样了
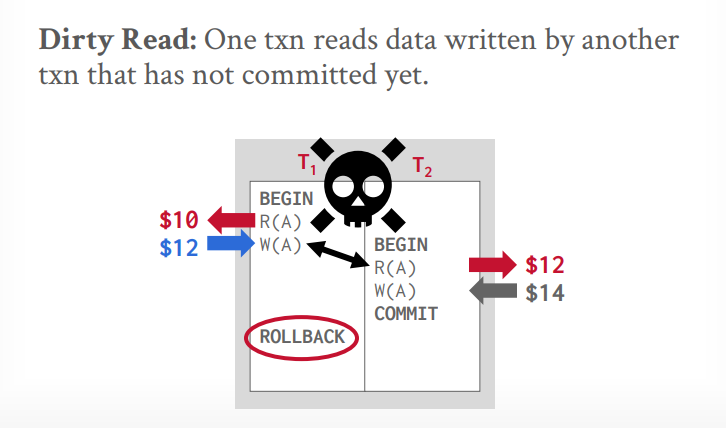
写读冲突(读未提交或脏读):A事务读取后,修改了值,B事务读取了修改的值,然后又修改了值,B事务提交后,A事务中止,回滚。
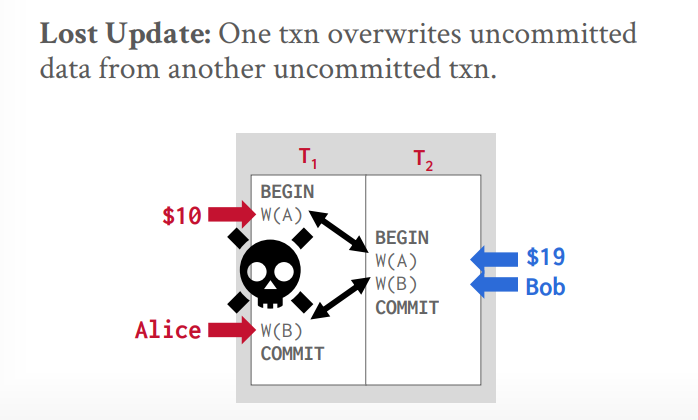
写写冲突(覆盖数据):两个事务同时写入一个值,有一个值会被覆盖掉。
冲突可串行化,大多数数据库使用的,还有个视图可串行化,没数据库实现
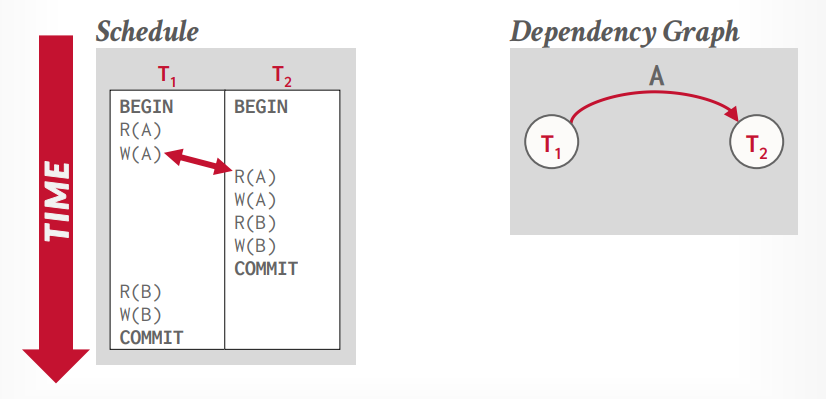
- 通过比较两个操作是否冲突,来修改顺序
- 使用依赖图(优先图)来判断依赖是否出现环
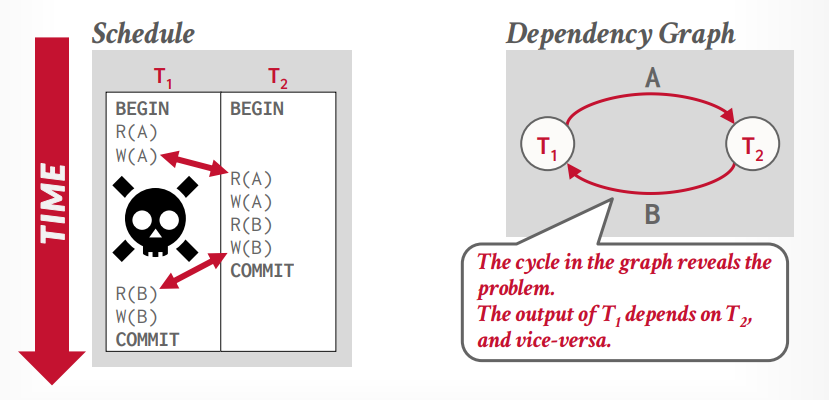
假设事务t1写入了A数据,事务t2同时读取A数据,那么事务t2就依赖了事务t1
假设事务t2又写入了B,事务t1要读取B,那么事务t1就依赖了事务t2,这个时候就产生了循环依赖,就跟死锁一样,所以这个时候需要回滚一个事务
两阶段锁
事务A先获取锁,事务B等待锁,事务A执行完成以后,释放锁,事务B才能拿到锁。
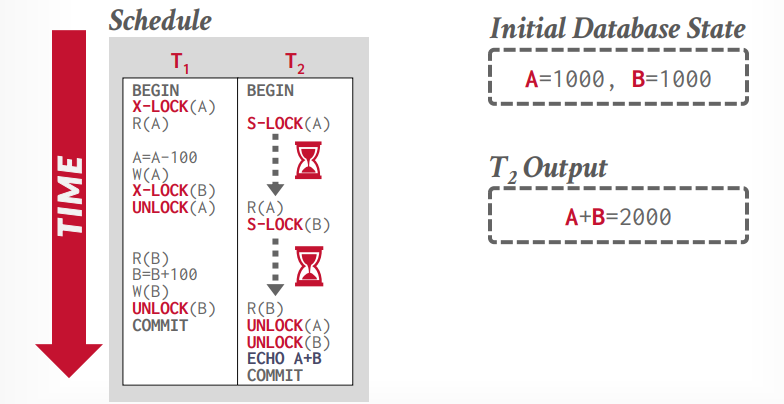
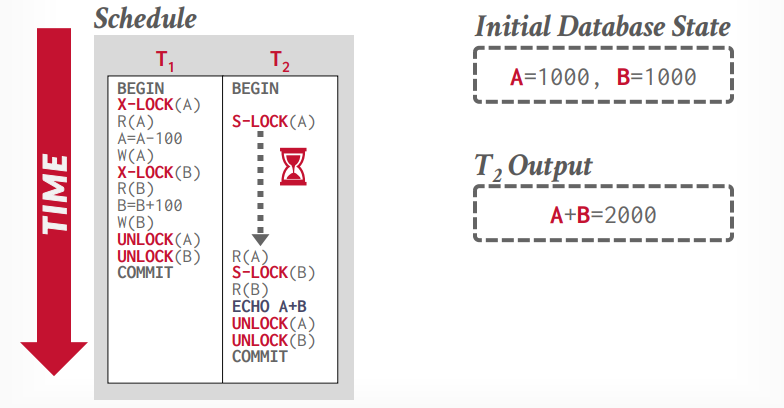
共享锁,读锁,S-LOCK
独享锁,写锁,X-LOCK
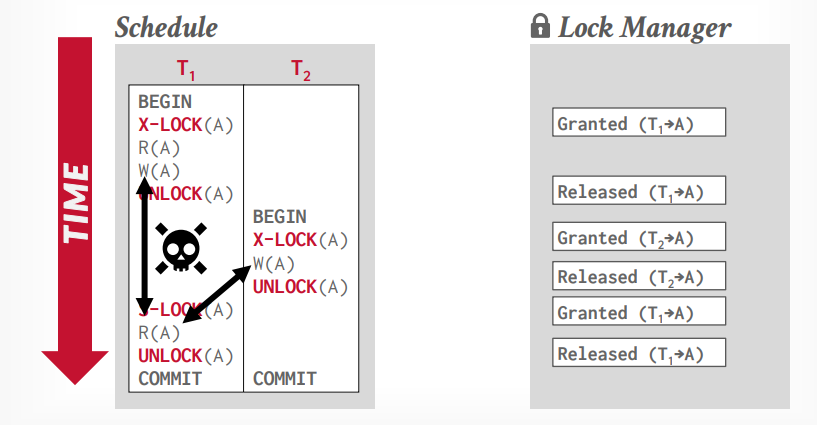
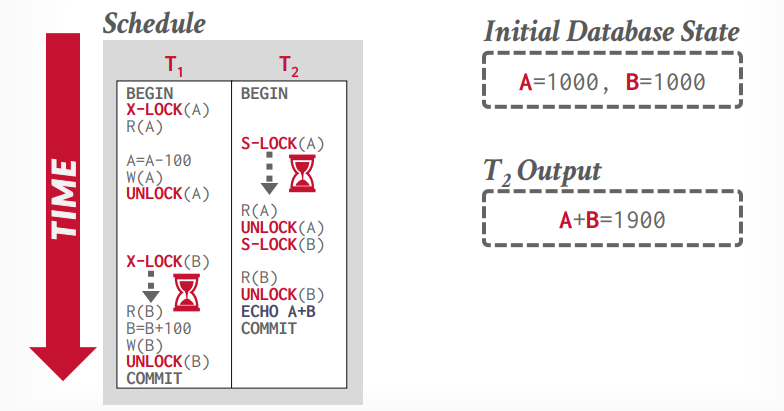
如上图所示,这样还是会出现不可重复读的问题,两阶段锁可以解决这个问题,两阶段锁是第一个正确的并发控制协议
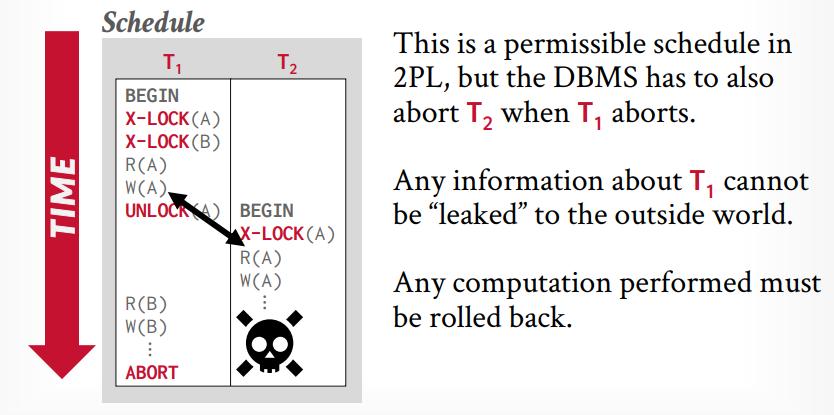
两阶段锁,遵循这个方法,使得事务是冲突可串行化的,但是会有级联事务中止(cascading aborts),可以通过强严格两阶段锁解决这个问题。
- 第一阶段Growing:每个事务从lock manager获取锁,事务释放锁以后进入第二阶段shrinking
- 第二阶段Shrinking:事务释放锁以后不能获取新锁,只能释放锁或者提交事务释放持有的所有锁
从生命周期来看,第一阶段是上升,第二阶段只会下降,不会再次上升,下图是正确的生命周期
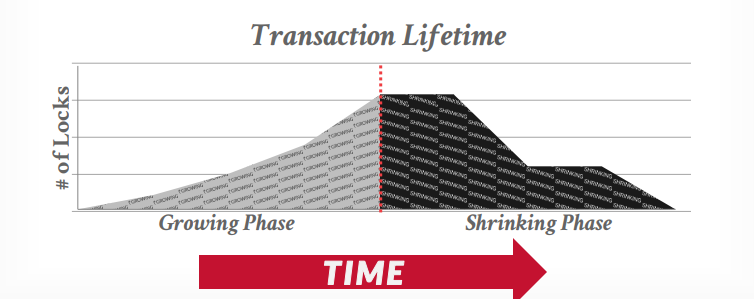
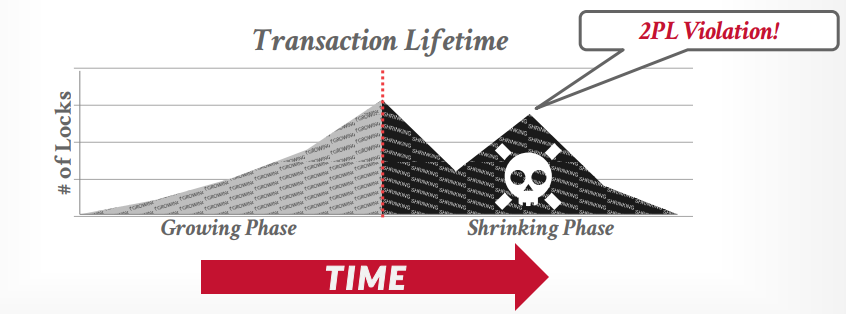
下图是错误的生命周期
cascading aborts,如果事务t1中止回滚了,那么事务t2就发生了脏读,所以也需要回滚重来
严格两阶段锁
在提交事务的时候才释放锁。可以解决脏读的问题。
非两阶段锁执行如下:
两阶段锁执行如下:
严格两阶段锁执行如下:
死锁
死锁检测:通过使用wait-for图来检测依赖关系,如果有环就是死锁
检测的频率可以通过参数调整,这个需要权衡
victim选择,选择出回滚哪个事务,这也是企业级系统和开源系统的区别
- 可以根据时间戳,选择年龄小的那个,认为刚加入的回滚成本小
- 根据持有锁的数量,选择持有锁少的那个回滚
- 根据已完成的工作量,选择查询数量少的那个回滚,可以认为回滚一个查询的成本比几十个查询的成本小
- 根据剩余的工作量
- 根据回滚的次数,这个事务老回滚,可能同情它不让它回滚,以避免“饥饿”
死锁预防
根据时间戳来选择
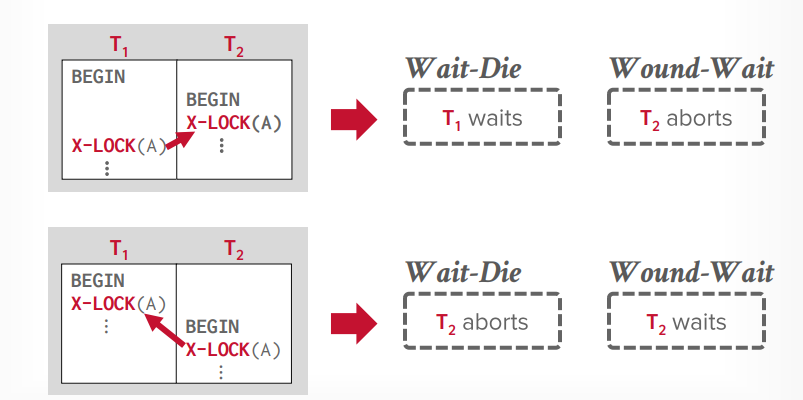
- wait die: 老的等待新的,如果事务t1先开始,事务t2后开始,t2先获取了锁a, 然后t1要获取锁a,那么就等待,因为老的要等待新的,因为t1是老的,如果t1先获取锁a,t2新的后获取那么t2abort
- wound die: 新的等待老的,如果事务t1先开始,事务t2后开始,t2先获取了锁a,然后t1要获取锁a,那么t2就abort,给老的让路,因为老的优先级高,如果t1先获取锁a,t2新的后获取锁a,那么就等待,因为新的等待老的
数据库锁层次
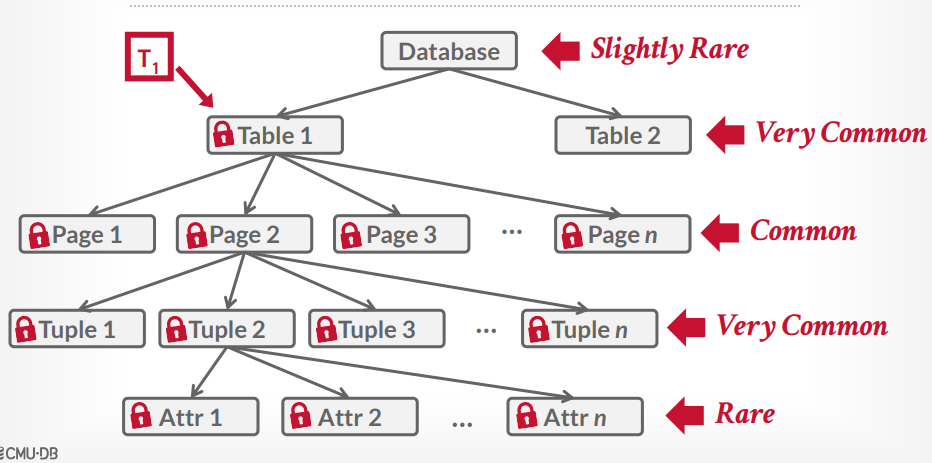
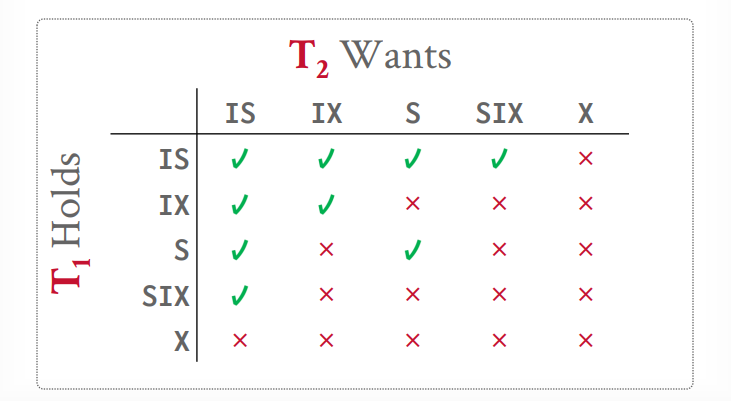
意向锁
意向共享锁IS
- 使用共享锁在较低级别锁定,共享锁粒度更细
意向排它锁IX
- 使用排它锁在较低级别锁定,排它锁粒度更细
共享意向排它锁
- 高级别用共享锁,低级别用排它锁
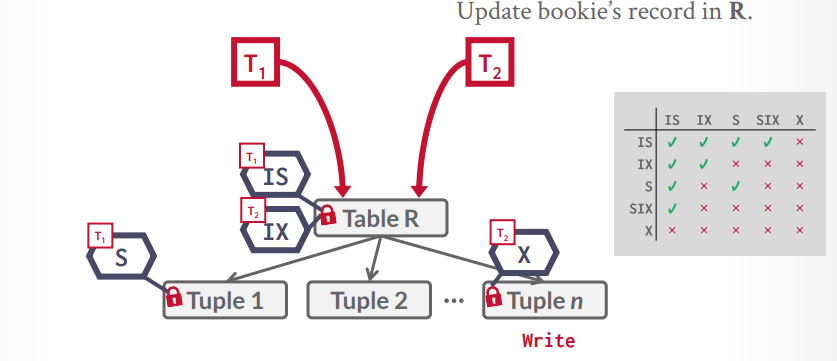
假设t1事务要查询一个tuple,那么可以在table上一个IS锁,然后在具体的tuple上一个S锁,接下来t2事务要更新一个tuple,发现表上是IS锁,那么根据规则,可以在table上在加一个IX锁,然后在要更新的tuple上一个X锁,如果恰好是同一个tuple,那么就等待S锁释放,如果不是同一个,那么就并发执行成功
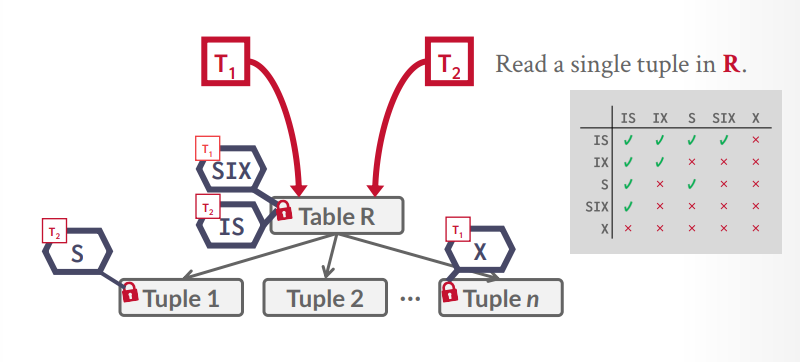
假设t1事务要扫描所有tuple来找到一个tuple去更新,那么table上一个SIX锁,然后扫描到一个tuple,就给一个tuple上X锁,扫描完就释放X锁,接下来t2事务要读取一个tuple,发现表上是SIX锁,那么根据规则,可以在table上一个IS锁,然后在要查询的tuple上S锁,如果刚巧tuple上有X锁,那么就等待t1事务释放。
时间戳并发控制
两阶段锁是一种悲观的协议,所有人都会上锁,会争抢,时间戳是一种不依赖锁的乐观的协议。
Ti代表事务i得一个时间戳,Tj是j的,如果Ti < Tj,那么i得事务会在j之前提交。
时间戳的两个特性
- 唯一性,每个时间戳必须是唯一的
- 单调递增性,时间戳必须是增加的
基本时间戳协议
每个tuple需要维护两个时间戳,一个读时间戳,一个写时间戳。
读
在读取的时候要保证,当前时间戳 > 写时间戳,也就是读取的是最新的值,未来不会被改变的值。
如果 当前时间戳 < 写时间戳,那么重启事务,分配一个新的时间戳,再试一次。
如果成功取到tuple,那么需要更新读时间戳,使用自己的时间戳和原来的时间戳中大的那个去更新。
写
写入的时候要保证,当前时间戳 > 读时间戳 并且 > 写时间戳
成功写入的时候要更新写时间戳,使用自己的时间戳和原来的时间戳中大的那个去更新。
托马斯写入优化
在写入的时候,如果当前时间戳 < 写入时间戳,本来应该中止的事务,可以继续执行,但是写入操作不写入数据库,因为数据库的数据是更新的,而是写入本地副本,方便这个事务后面使用。
乐观并发控制
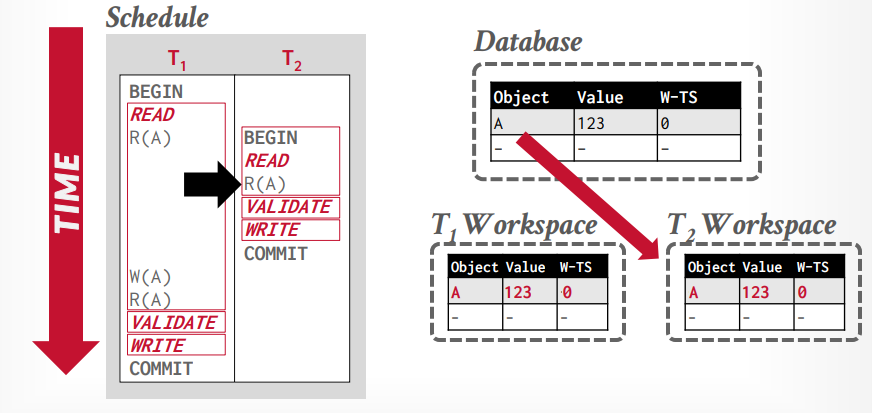
另外一个是乐观并发控制。为每一个事务创建一个私有空间,他的所有操作都是先对私有空间的副本操作,最后执行到数据库里面的时候需要对比一下,是否能执行。如果不冲突,就可以执行。
三个阶段
- read phase(work phase): 执行事务的操作,操作都在私有空间执行。
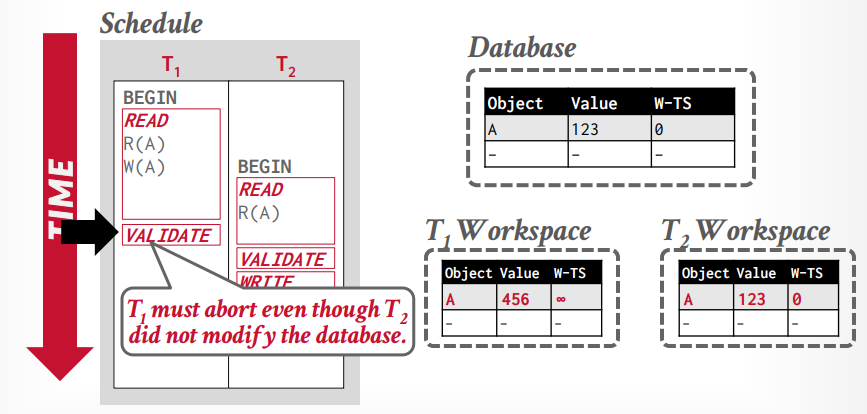
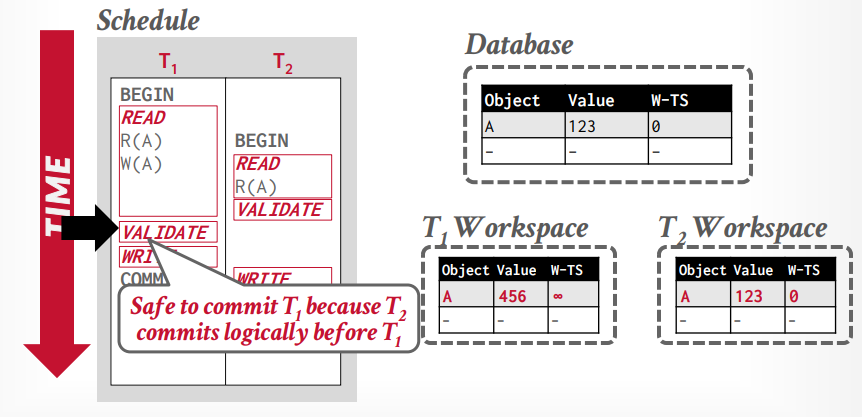
- validation phase: 提交事务的时候验证事务的有效性,是否冲突等,确实是否可以提交。在这个阶段才会分配时间戳。如果在之前需要写入时间戳,先暂时写入无穷大。并检测是否和其他事务的时间戳冲突,其他事务包括以前的所有事务和正在执行的事务
- write phase: 如果校验成功,将时间戳写入W-TS列,将修改写入全局工作区,否则abort事务,这是原子的。
假设事务t1读取tuple A,将从全局工作区复制A到私有工作区
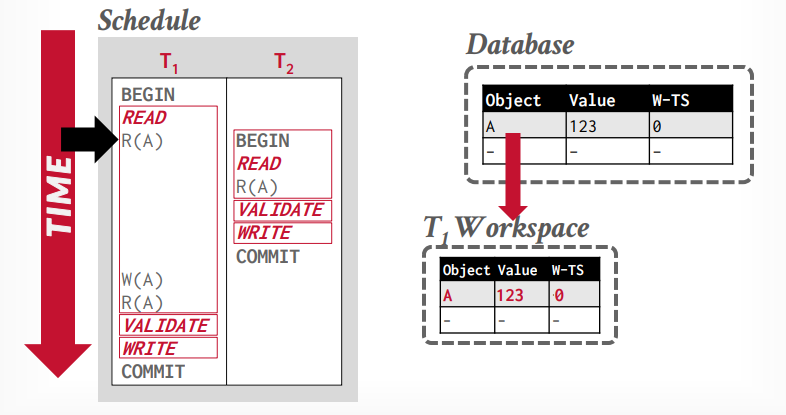
接下来事务t2读取tuple A,也将从全局工作区复制A到私有工作区
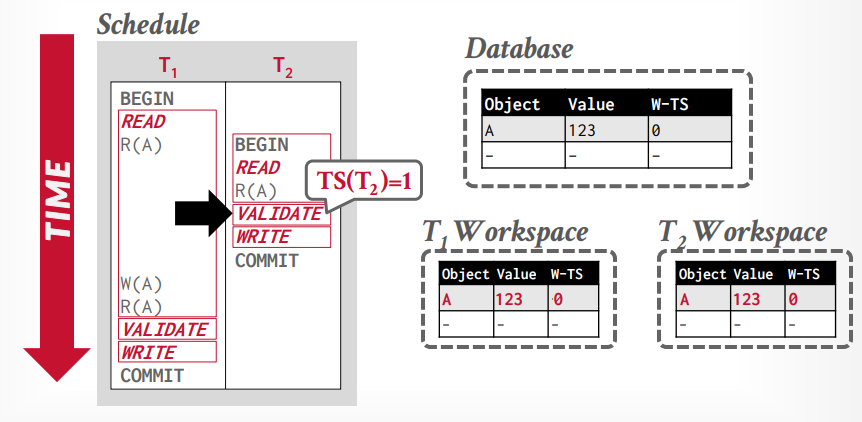
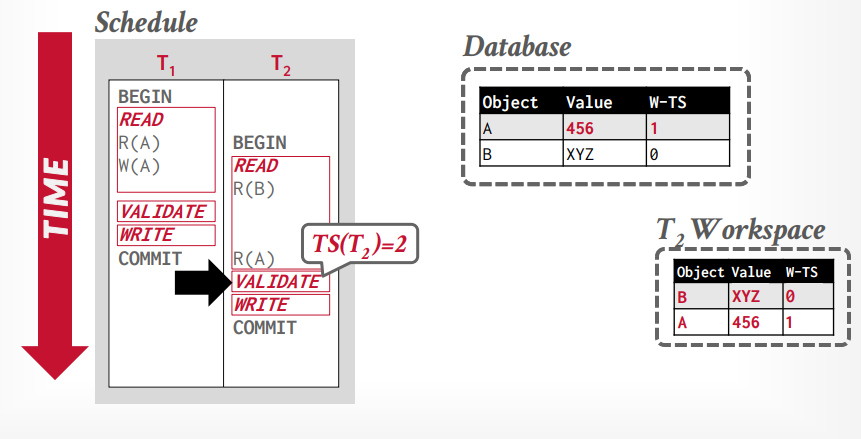
接下来事务t2进入validation阶段,然后分配时间戳为1,接下来进入写入阶段,什么也不做
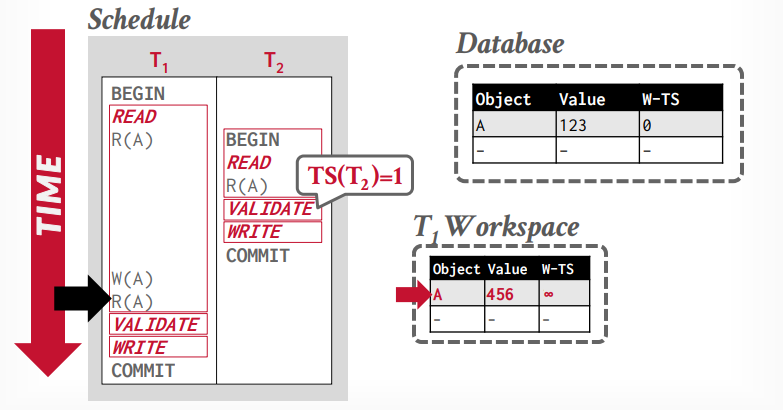
事务t1修改tuple A,然后再次读取tuple A,可以重复读取,因为读取私有工作区的tuple A
事务t1进入validation阶段,分配时间戳为2,因为1已经分配给t2事务了,写入阶段将私有工作区的tuple A,更新到全局工作区
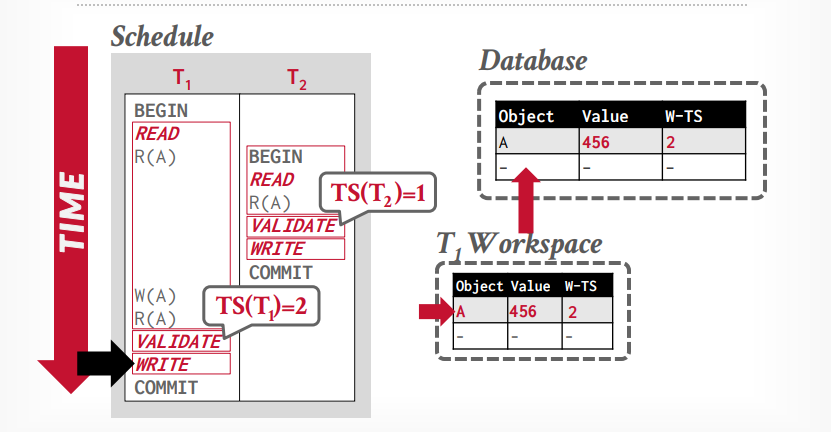
数据库拥有全局视野,在validation phase阶段,是单线程比较事务是否可以执行,会有一个大的latch上锁
- backward validation: 和并发执行中更早已经提交的事务进行比较
- forward validation: 和并发执行中后面没有提交的事务进行比较
forward validation
如果事务t1 < t2,t1的写阶段在t2的读阶段之前,则没有任何冲突发生。
如果事务t1 < t2,但是t1的valition阶段在t2的validation阶段之前,则冲突,因为t1已经更改了tuple A ,而t2读取的是W-TS=0的tuple A,如果t1事务的W-TS是1,t2是2,那么t2读取的应该是W-TS=1的tuple A才对
如果t2的validation阶段在前就没问题,因为t2分配W-TS=1,t1是2
如果事务t1 < t2 ,t1的validation阶段在t2的前面,但是t1已经写入全局工作区以后,t2在读取这个tuple,就没有问题
forward validation和没有提交的事务进行比较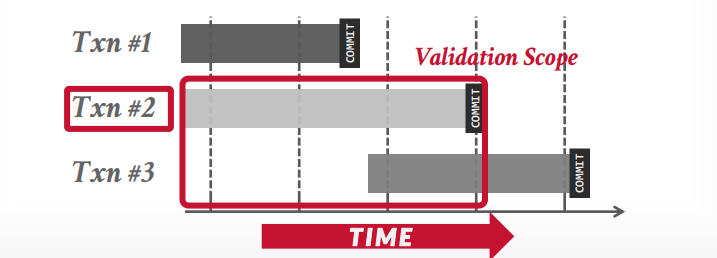
backward 和已经提交的事务比较
partition based 时间戳协议
按照时间戳水平分区,在同一个区里面,按照时间戳顺序执行,就不需要latch了。速度会很快。
在不同区执行的话,就很复杂了。
每个分区都是单线程执行的。这样不需要获取latch。
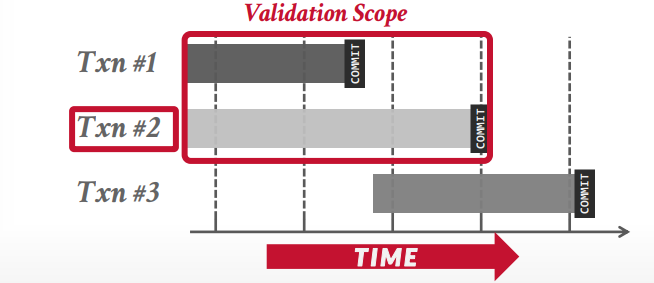
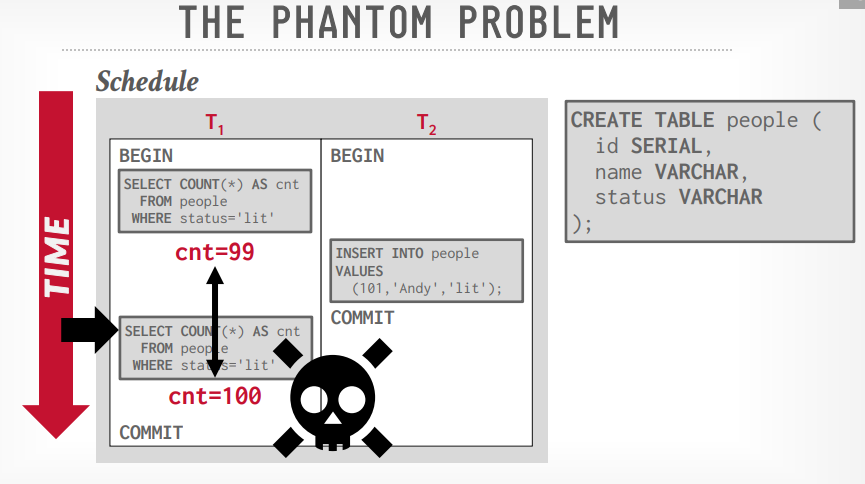
幻读问题
假设事务t1读取了table a的count()是99,事务t2插入了一条数据,事务t1再次读取count()就变成了100,因为t1只能lock已经存在的数据,要插入的数据没办法lock
解决幻读的三个方法
- 重新执行扫描:提交后重新执行扫描看结果是否一致,不一致就发生了幻读,少见
- predicate locking:System R提出的方案,锁定where语句,进行比较,很难实现,非常少见,duckDB,Hyper等实现了
- Index Locking: 索引锁定,常见
Index Locking
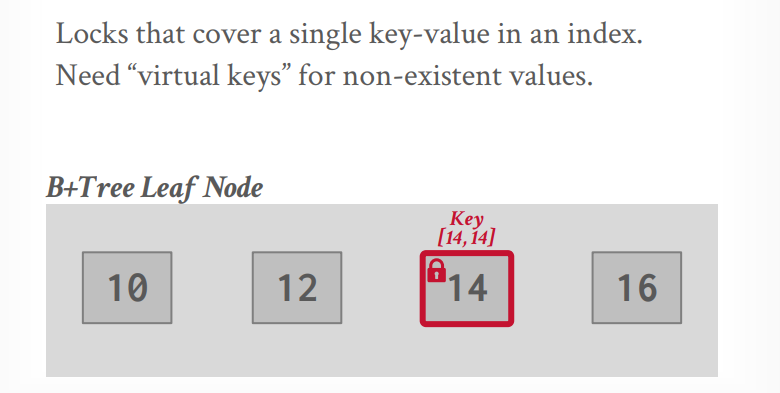
- key-value locks
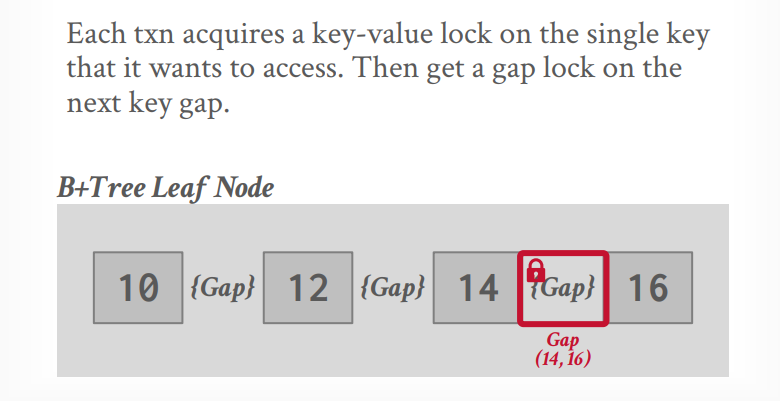
- Gap locks (间隙锁)
- Key-Range locks
- Hierarchical locks
key-value locks只能锁定键值,需要一个virtual key来锁定不存在的key
间隙锁,锁定键值和下一个键值之间的间隙
key-Range locks,锁定键值以及和下一个键值之间的间隙
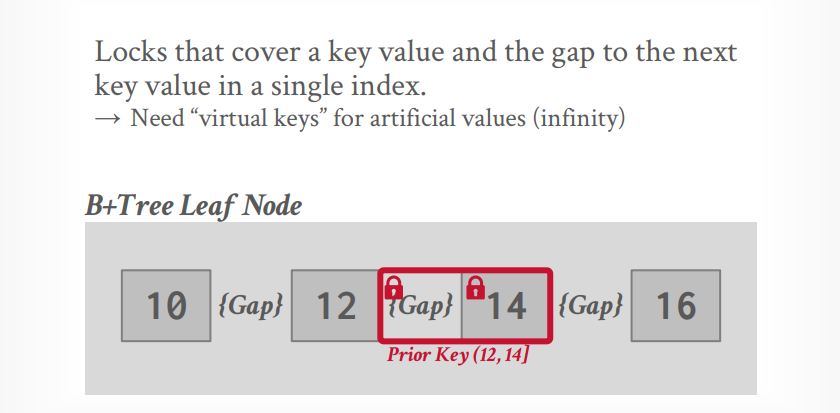
Hierarchical locks使用IX,IS等意向锁
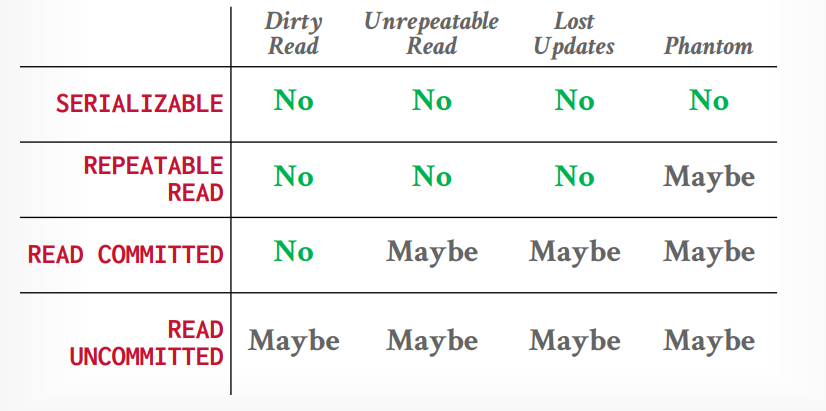
不同隔离级别对应的问题,最受欢迎的隔离级别是读已提交,mysql默认是可重复读
多版本并发控制(MVCC)
MVCC(Multiple Version Concurrency Contronl)最早在1978年由一位MIT的Phd学生提出。在1980年被数据库实现。
firefox 最开始叫 phoenix, 但是因为和其他的重名了需要改名字,然后改成了firebird, firebird是个最早开源的数据库,它使用了MVCC,所以火狐还要改名,就成了firefox。
- Writers don’t block readers
- Readers don’t block wirters
只读事务读取快照,不需要锁。MVCC天然支持快照隔离,如果没有gc,支持time travel query,就是可以查询很久以前的更改
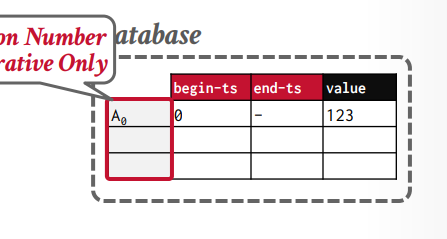
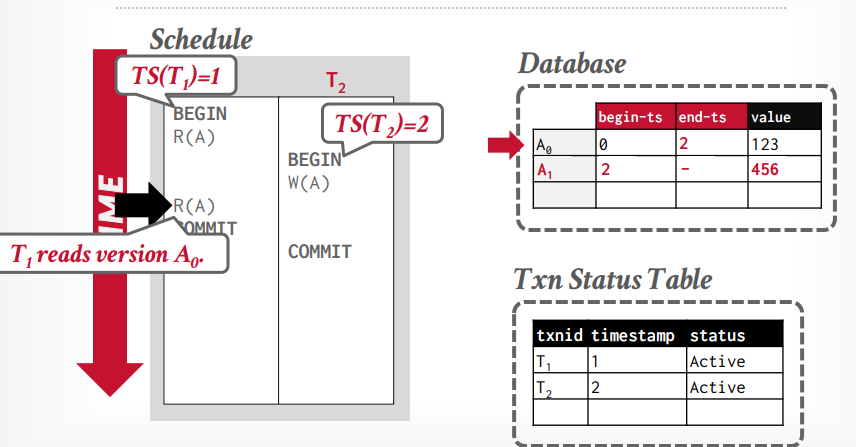
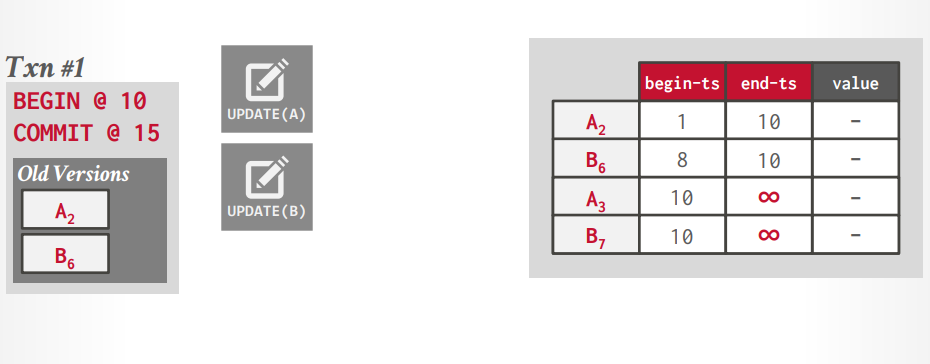
版本维护有3个元数据
- version 版本号 从0开始,递增
- begin 开始的时间戳
- end 结束的时间戳,默认是无穷大,当写入以后要更新上一个版本的end
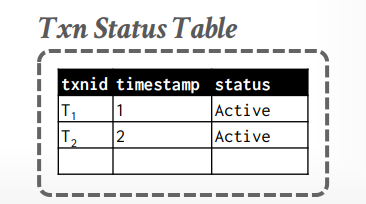
还要维护一个事务状态表
- txnid: 比如事务t1,t2标识
- timestamp: 时间戳,如OCC那样
- status: 活动中,已提交等
假设事务t1读取A0的数据,然后事务t2写入A1数据,然后更新A0的end-ts=2,事务t1再次读取的时候还能看到A0
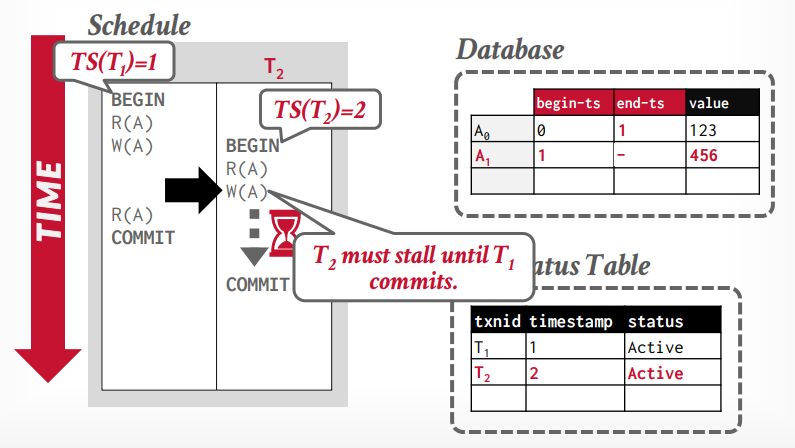
假设事务t1读取A0的数据,然后写入A1的数据,事务t2读取A0的数据,写入A2的数据,这个时候t2会阻塞,因为t1持有A的锁,当t1事务commit后,释放锁,事务t2才能继续写入A2的数据
当事务启动的时候,会看到启动时数据库里的一致的快照
- 没有来自未提交的事务的撕裂写入
- 如果两个事务更新同一个tuple,第一个写入将获胜
快照隔离收到写入偏差异常(Write Skew Anomaly)的影响。
写入偏差异常,假设当前有2个黑球,2个白球,事务t1要将白球更新成黑球,事务t2要将黑球更新成白球,这个时候事务t1读取到2个白球,只将这个两个白球更新成黑球了,而事务t2读取了2个黑球,只把这2个黑球更新成白球了,最终结果还是2黑2白
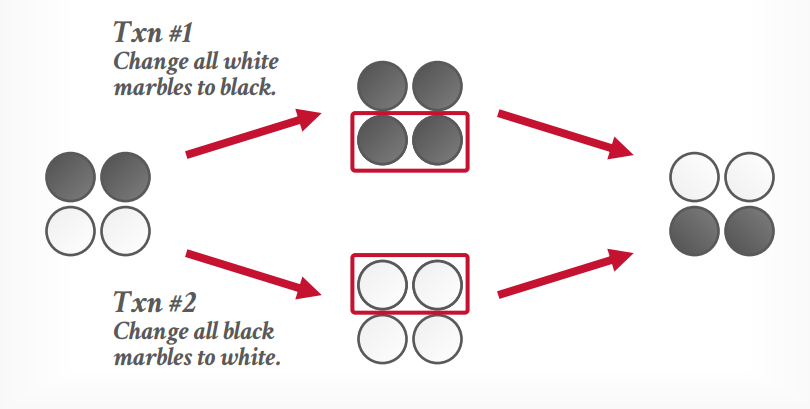
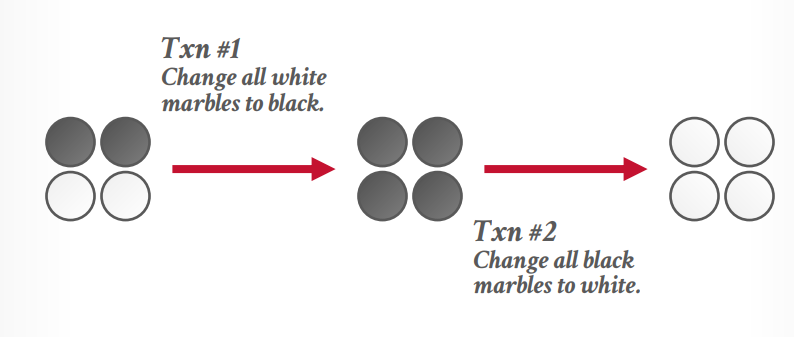
但是顺序执行的话结果应该是全白或全黑。
并发控制协议
- timestamp ordering:分配一个确定顺序的时间戳
- OCC:乐观并发控制
- 两阶段锁
版本存储
版本存储:为每个逻辑tuple创建一个链表,每个事务通过指针遍历链表获取对应的版本。索引指针指向链表的头节点。
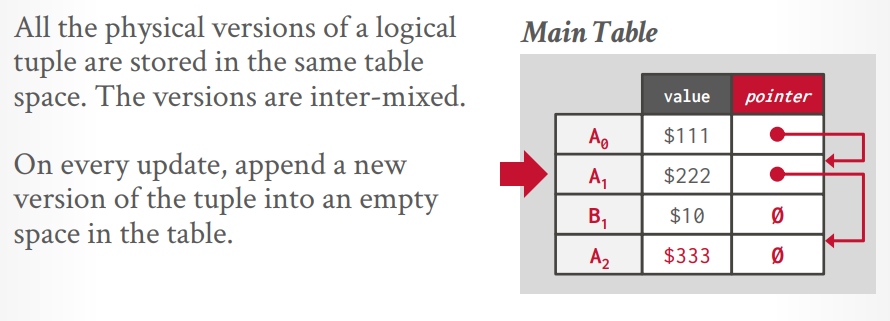
- append only storage: 复制一个tuple,更新数据,放到后面的节点作为tuple的新版本。
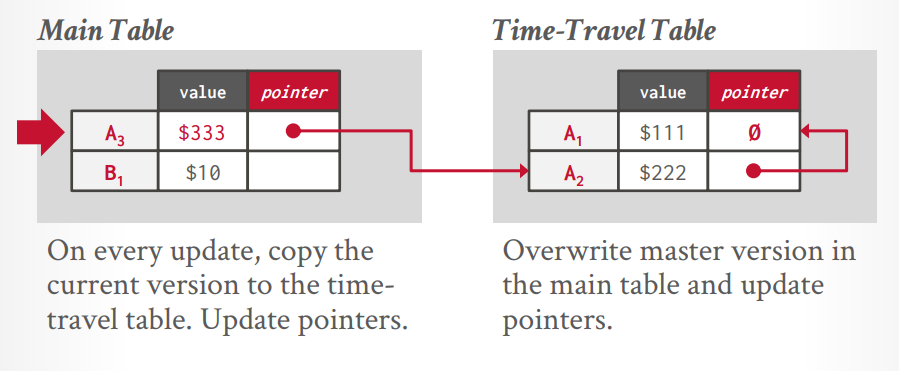
- time travel storage: master version表中放最新版本的数据,老版本的数据放在 time travel 表中。master version表维护指向time travel表数据的指针。
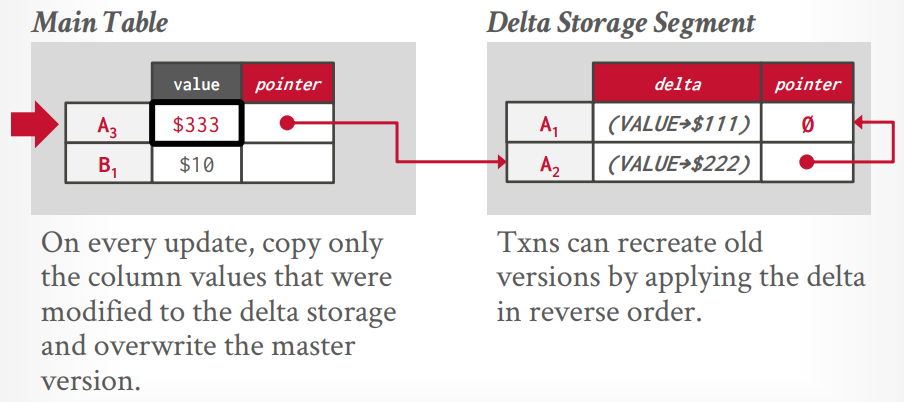
- Delta Storage: 最佳方案,只维护对前一个版本数据的修改,不直接维护所有副本。
append only storage
要么最新到最旧的连接,要么最旧到最新的连接,全都放在一个工作空间中,然后用指针连一起
time travel storage
这个是两个空间来存储,一个main table存储最新的,一个time travel table存储所有旧的,像Sql server这种最初没有设计MVCC的数据库,为了兼容使用了这种方法。
Delta storage
也是两个空间存储,不同的是旧空间只存储修改的列的值
garbage collection
garbage collection(垃圾回收)
- tuple level:通过比较时间戳来确定哪些版本已经不用了,可以进行回收了。
- transaction level:在事务提交的时候进行对比旧版本的数据是否可以删除
tuple level gc
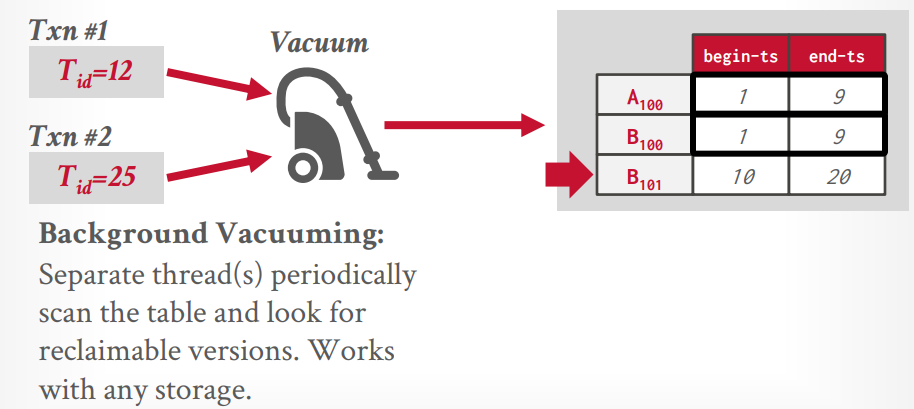
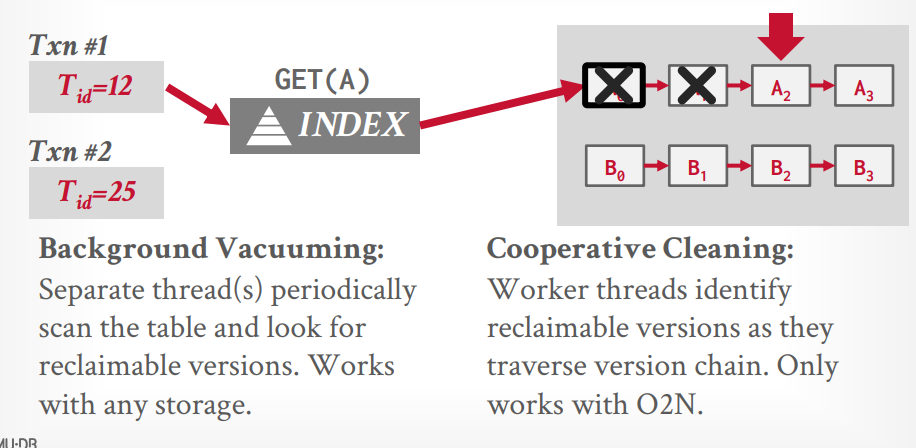
vacuum
后台线程的方式运行,每隔一段时间去扫描,还可以通过bit map来提升速度
假设现在正在运行的事务有两个,最低时间戳是12,那么所有end-ts低于12的都可以被gc,数据库基本都用的这个
cooperative cleaning
当查询某个tuple的时候,进行扫描这个tuple的旧版本,从而gc,缺点是如果这个tuple一直不被访问,那么就一直不gc,很罕见
transaction level gc
在事务提交的时候进行对比旧版本的数据是否可以删除
索引管理
索引管理
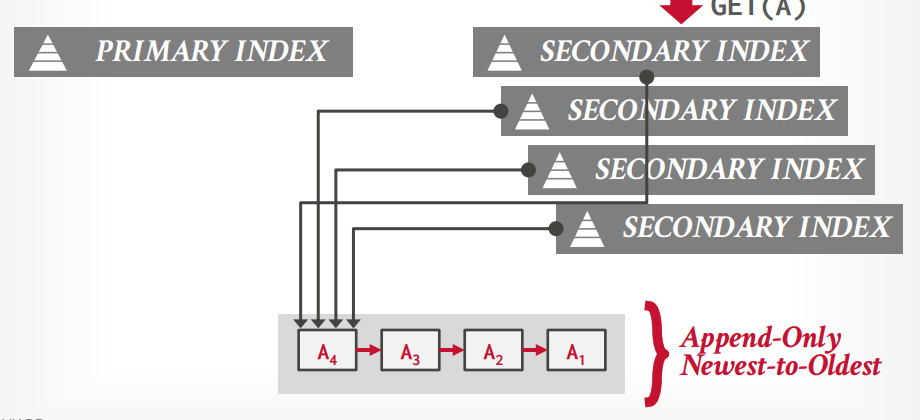
- 逻辑指针:通过中间表转化指针和物理地址,二级索引指向主键索引。
- 物理指针:直接记录指针
物理指针
所有的索引都记录指针,缺点是更新的时候所有索引的指针都要更新
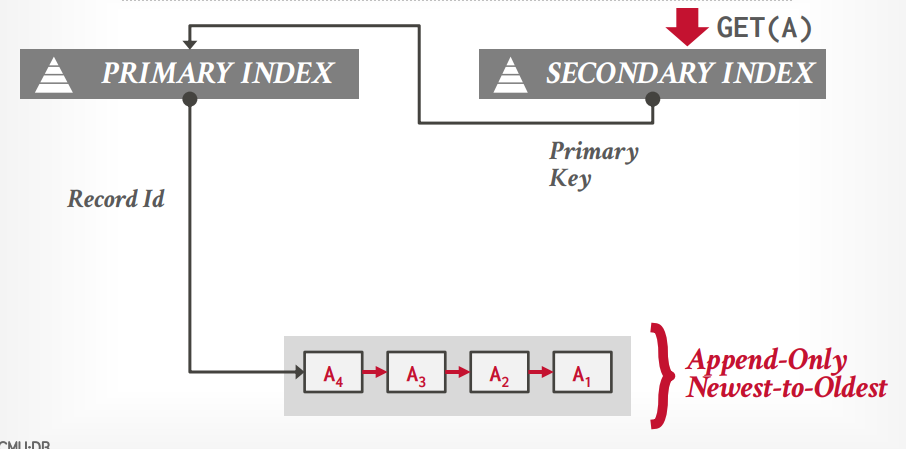
逻辑指针
二级索引都记录主键,只有主键索引记录指针,mysql就这样的,这种方式更好
重复key问题
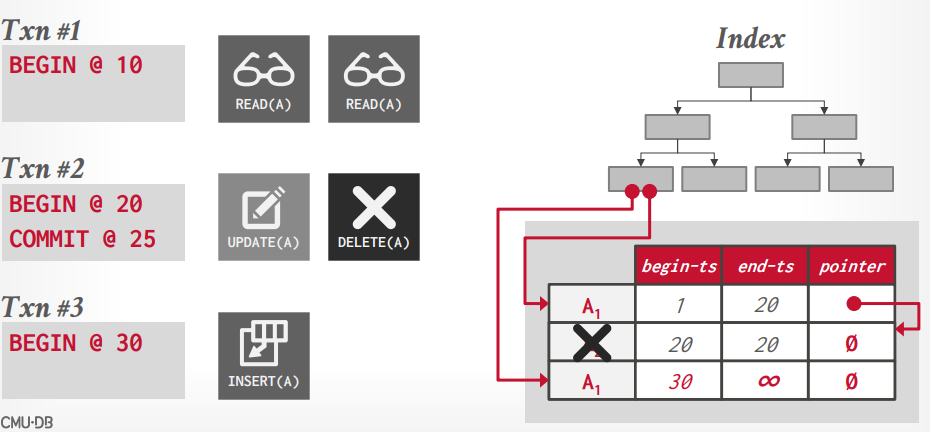
如果索引不是唯一索引,可以有多个key的话,假设事务t1读取A1,没问题
假设事务t2更新了A1,又删除了A1,那么数据如图所示A1老版本指向新版本,但是新版本是被删除的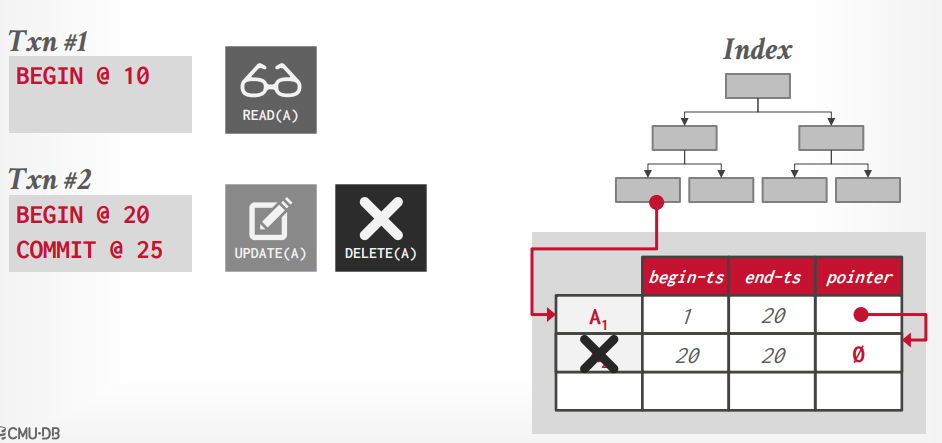
假设事务t3插入了一条A1数据,那么索引就指向两个A1数据
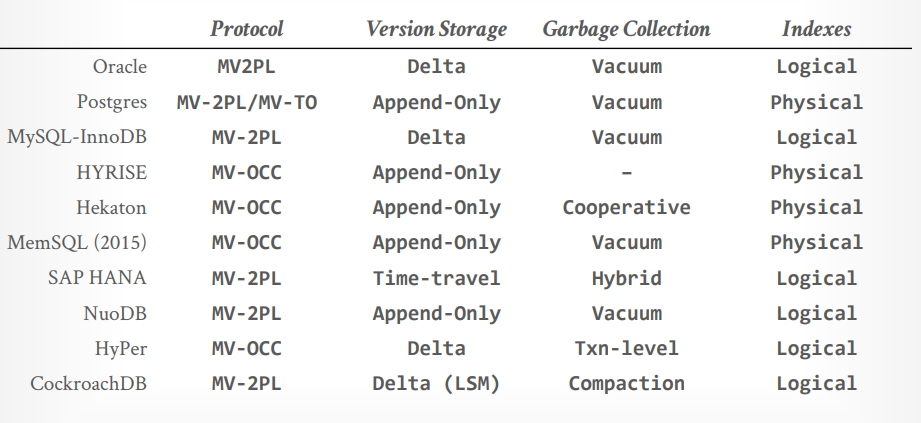
MySQL使用两阶段锁,版本存储使用Delta Storage,垃圾回收是tuple level Vacuum,索引管理是逻辑指针。Mysql更快。
PostgreSQL使用两阶段锁,版本存储使用append only storage, 垃圾回收使用tuple level Vacuum,索引管理是物理指针。
MVCC实现
Logging Schemes
在数据库运行时,还没有把数据写入磁盘的时候发生故障,这个时候需要恢复数据。
故障恢复
主要是两件事
- 收集日志信息,以方便恢复
- 根据日志信息进行恢复
故障类型
- 事务故障
- 系统故障
UNDO(撤销) and REDO(重做)
Undo:维护一些信息,可以恢复事务对数据库中某个对象所做的任何修改。
Redo: 维护一些信息,可以重新执行某个事务对数据库中的某个对象所做的修改。可以重新执行一个已经提交的事务的修改。
buffer pool 策略
两个策略
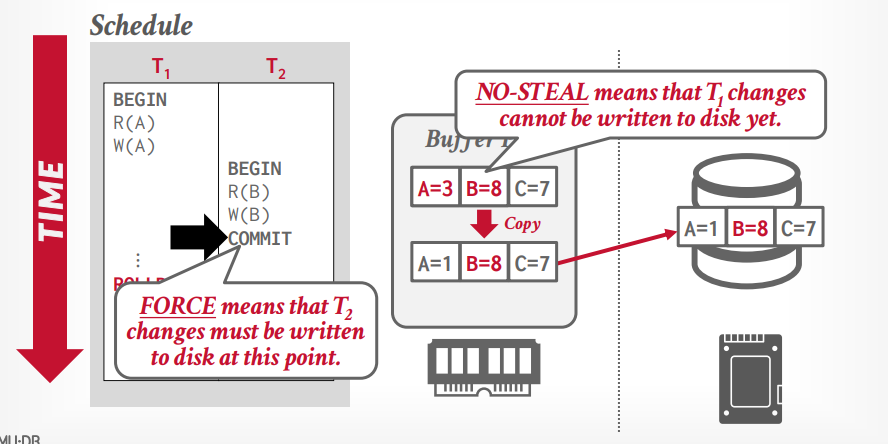
- steal:是否允许一个已提交事务写入磁盘的时候把这个page里面的未提交事务的修改也写入磁盘。
- force:提交事务的时候,是否允许事务的所有更新写入磁盘
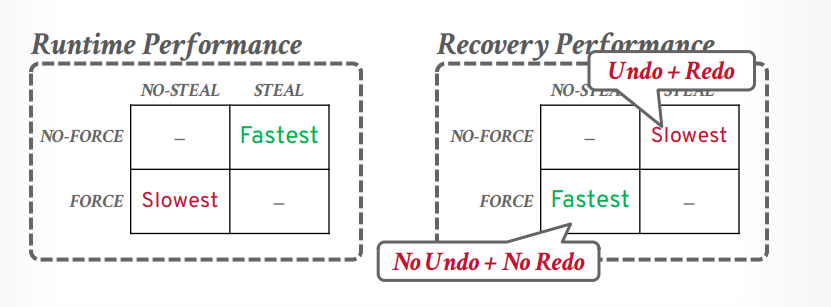
not steal + force
- 优点:不需要恢复,因为只写入磁盘提交的事务更新的内容。磁盘就是已提交内容
- 缺点:多个事务提交需要写入多次磁盘,写入磁盘麻烦点,因为要复制一个副本出来,副本中是这个事务修改的内容,把这个副本写入磁盘。
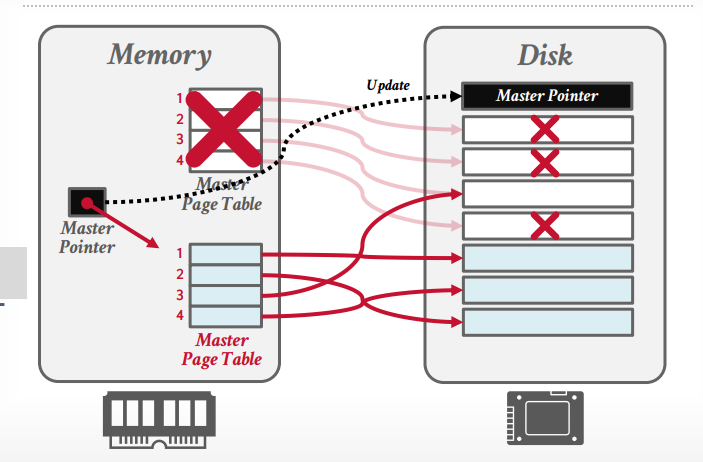
shadow paging:
- 有一个db root,记录当前使用的hash table
- hash table有一个master table是当前使用的,每个事务会有一个shadow page table,提交以后更新db root指向这个shadow page table,然后回收之前的master table和对应的page文件
wirte ahead log
- 先写入日志,在写入磁盘
- 日志中包含的信息可以用来undo and redo。
- 使用的策略是 steal + not force,所以不需要把事务的所有更新都写入磁盘。
日志内容
- 事务id
- 对象id
- 时间戳
- before value(undo)
- after value(redo)
- 写入更快,但是恢复速度慢
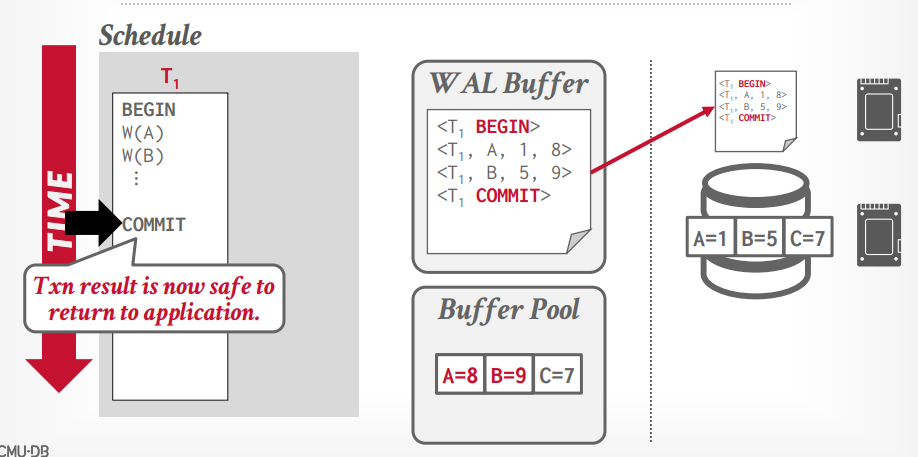
当事务执行的时候,写入日志到内存中,比如事务t1,将A从1修改到8,当事务提交的时候,先把日志写入磁盘,然后告诉客户端事务成功,如果这个时候发生断电等,可以读取日志来恢复事务,如果写入日志之前断电,那么无需恢复,因为没有告诉客户端成功,事务没有成功如何办是客户端要考虑的。
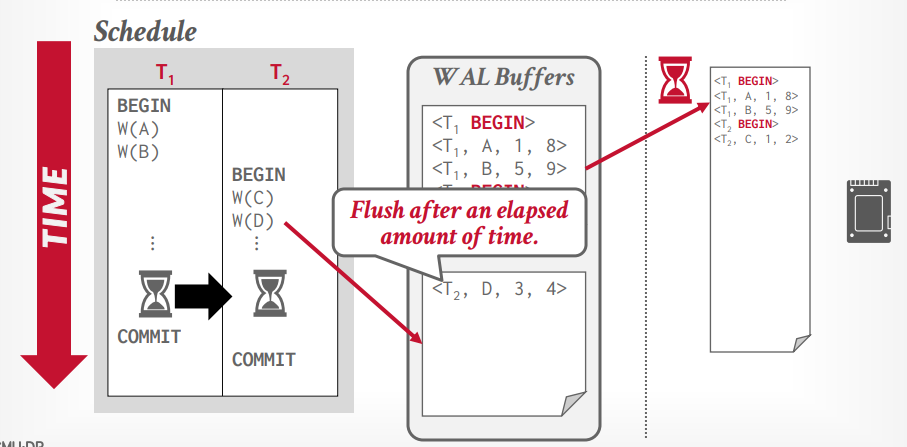
group commit
- 有两个log buffer,写满一个以后,写另一个,将满的log buffer写入磁盘
- 除了满的时候写入磁盘,还有定时,如果知道写入磁盘的时间,可以定时成这个时间,没满的话时间到了也会写入磁盘。
满了的写入磁盘可以异步写入,增加速度
shadow paging 和 WAL 就是一种权衡,是看重运行时速度还是恢复速度,几乎所有的数据库都是用WAL,比如mysql的bin log, WAL运行时速度更快
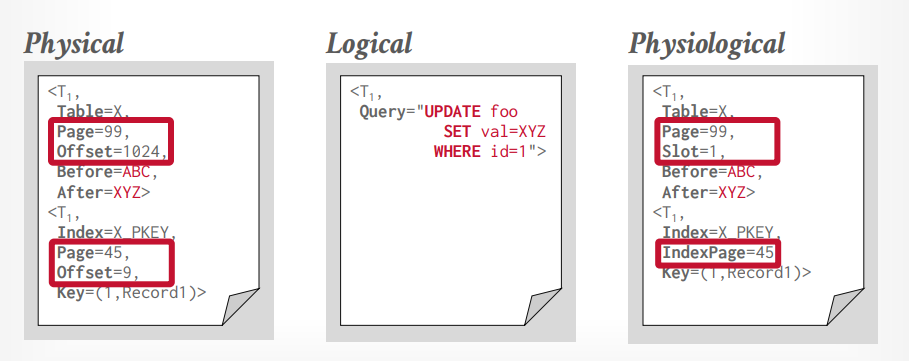
logging schemes
- 物理日志:记录底层字节的修改,就像git diff一样能看见,但是修改1万条tuple,就会记录1万条tuple的修改。
- 逻辑日志:记录高层的事务操作,像update,delete,insert等。比物理日志省空间,但是恢复的时候不知道哪些tuple已经写入了磁盘,所以恢复的时候还会在写入一遍。
- 混合日志:记录相对底层的修改,但是不像git diff一样那么详细。
check point
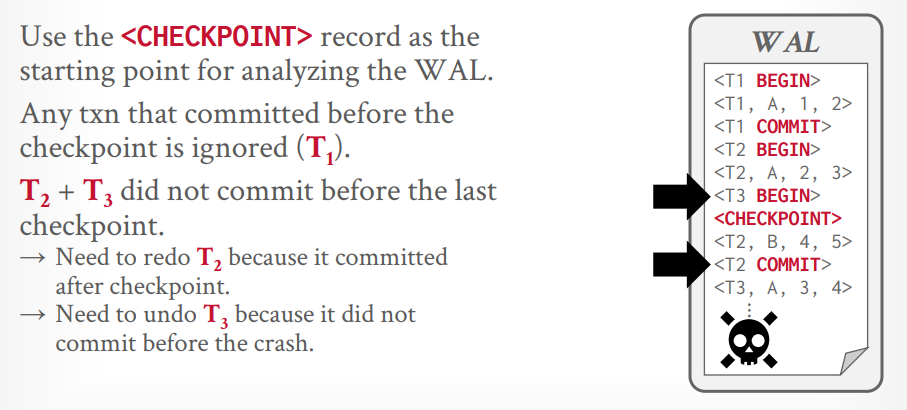
WAL的缺点是无限增长,如果崩溃后,则需要重现所有的WAL,增加检查点以后,可以只重现检查点以后的日志。
日志中写入check point,check point之前的都是已经写入磁盘的,所以恢复的时候就不用管了。
假设事务t1在检查点前commit了,则不需要恢复,因为已经提交了,事务t2在检查点后commit,在检查点前开始,则需要redo恢复事务t2,事务t3在检查点前开始,但是还没有commit,所以不需要恢复,直接撤销即可。
aries recovery
三步
- 预写式日志
- Repeating history during redo: 重启并恢复事务到之前的状态
- logging changes during undo:再次写入预写式日志
日志序列号(LSN)
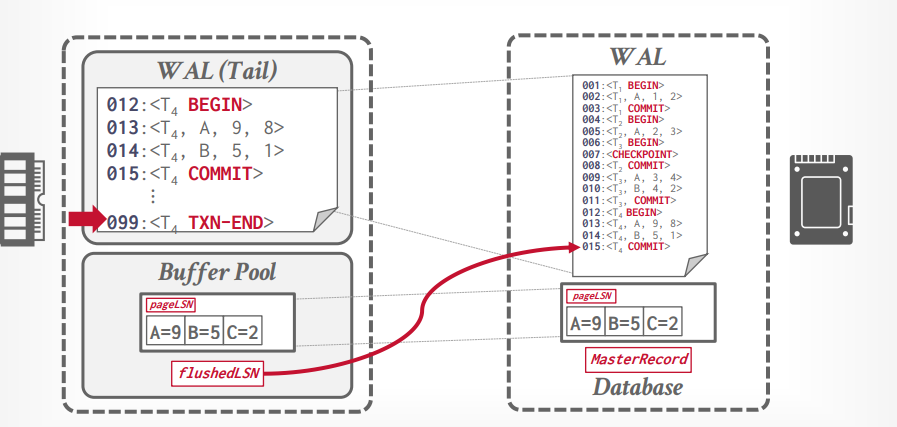
- 每个日志都要有一个序列号,在一个事务中,可能不是连续的,但是递增的。
- flushedLSN:在内存中,记录上一个刷到磁盘中的log的LSN
- pageLSN: 在page中,记录page最新的序列号
- recLSN: 在page中,记录最老的序列号,这个是不会变的,而pageLSN一直在更新。
- lastLSN: 记录事务中最新的一个日志
- Master Record: check point最新的LSN
如果pageLSN <= flushedLSN, 表明这个page的数据都已经写入磁盘了
事务提交的时候,往日志里面写入一个txn end。
当事务commit后写入磁盘,然后更新flushedLSN,接下来添加txn end标识
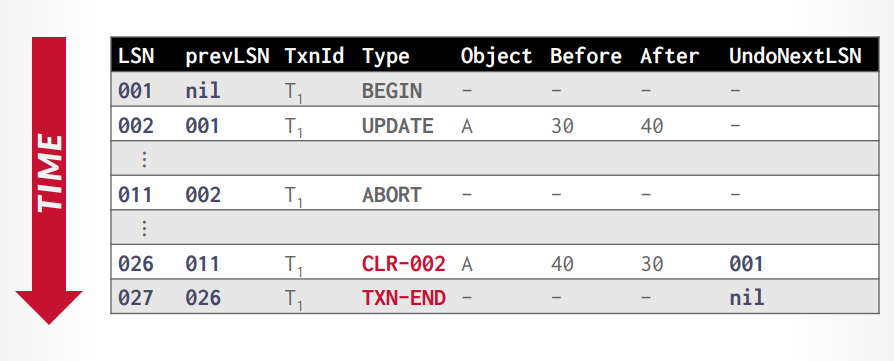
CLR:abort算法
- 当事务abort的时候,进行撤销操作,日志里面添加CLR记录,before是对应的之前事务日志的after,CLR的after对应之前的before,undo next指针指向下个需要撤销的日志。
- 撤销完成以后添加
txn end。
写入的时候如同链表一样,除了记录本次的LSN以外,还要记录上一个的LSN,比如本次001,上次是Nil,本次002,上次001,以此找出这一次事务的所有日志,比如事务t1是001-nil,002-001,接下来事务t2是003-nil,004-003,然后事务t1是005-002。
接下来插入CLR日志,CLR可以是026-011,CLR-002代表要撤销的是LSN=002的日志,记录了从40恢复到30,最后在插入txn-end标识
check point写入
- 第一种方式是停止创建新事务,等所有事务完成的时候开始写入
- 优点是能完全保证数据一致性
- 缺点是耗时,执行的时候不能创建新事务
- 第二种方法暂停更新的事务,只读事务不受影响,需要维护一个active transation table和一个dirty page table
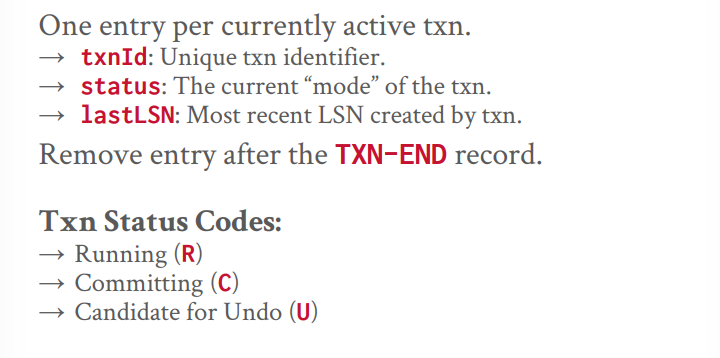
- active transation table包含事务id,lastLSN和状态,状态有运行中,提交中,等待undo
- dirty page table 包含所有的dirty page信息
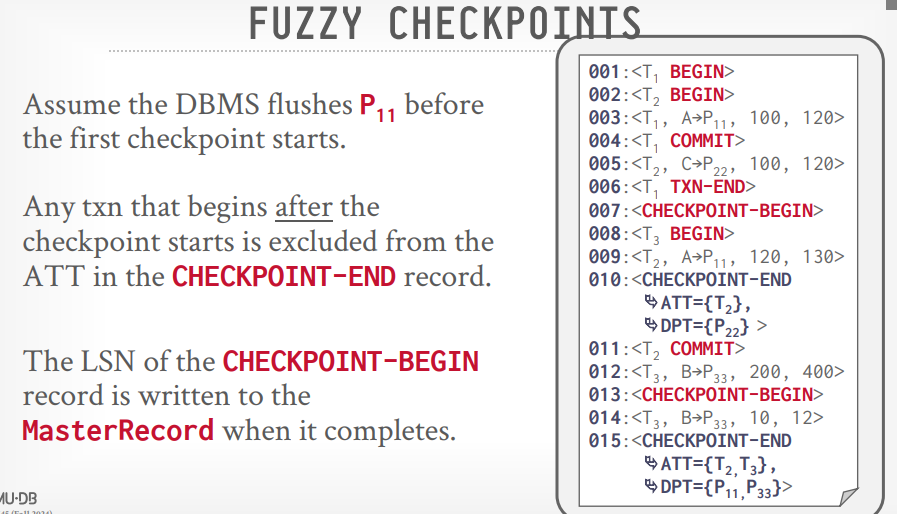
- 第三种方法最好,叫fuzzy checkpoint,checkpoint的时候允许所有事务运行。
- 开始的时候记录checkpoint begin
- 结束的时候记录checkpoint end,end里面包含了 checkpoint期间的active transation table和dirty page table信息。
ATT(Active Transation Table)
DPT(Dirty Page Table)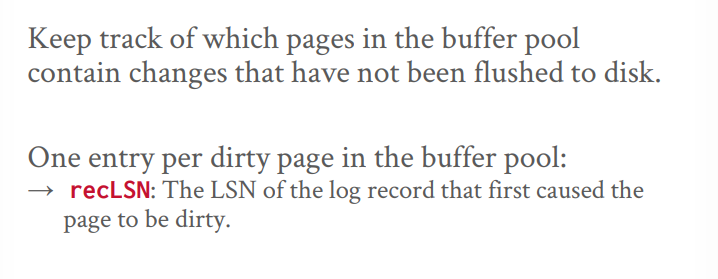
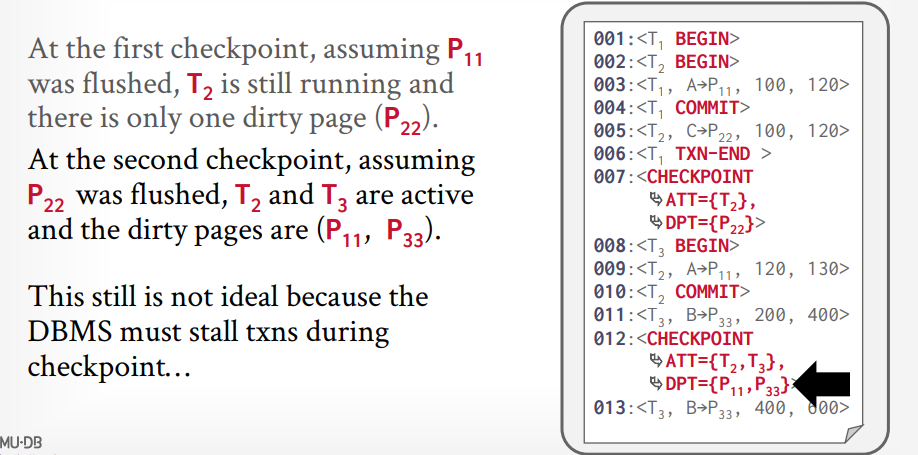
第一个check point记录了ATT是T2事务,代表事务t2在check point之前开始,且未提交,而事务t1在check point之前已经提交了,所以不记录,DPT记录了事务t2在check point之前修改的脏页是P22
第二个check point记录了事务T2,T3,因为T2虽然在第二个check point之前提交了,但是没有插入txn-end代表没有提交结束,DPT记录了两个check point之间的脏页P11和P33
fuzzy check point
因为所有事务都在运行中,所以增加了check point begin 和 end来标识check point的开始和结束,第一个check point end里面记录了事务t2和脏页P22,是因为这些发生在check point begin之前。
arise recovery
- 分析:根据master record跳到对应的check point的位置,然后开始扫描需要恢复的信息。
- redo: 重新执行所有的操作。
- undo: 从日志最后开始往上,撤销所有未提交的更改。这个时候已提交的已经写入磁盘,未提交的已经被撤销。
分析阶段:从master record的位置开始扫描到最后,找出这之间的所有active transation table和dirty page table信息。
redo: 根据分析出的信息,找到dirty page中最早的一个recLSN, 也就是最早的一个日志,然后从这里开始恢复数据,执行一遍所有的操作。来恢复buffer pool。
undo: 从最后开始往上面扫描,把需要撤销的数据进行撤销。
分布式数据库介绍
并行数据库
- 离得近的
分布式数据库 - 离得远的
系统架构
- shared everthing
- shared memory:常见于高性能计算领域,有多个CPU,共享内存和磁盘
- shared disk: 内存也有多个,共享磁盘,这个更常见,例如云数据库
- 更新数据的时候需要通知其余的节点
- spark,HBase
- shared noting: 磁盘也是多个
- 有更好的效率,但是很难保证数据一致性和扩容
- mongo,ES,Etcd,Zookeeper,ClickHouse
shared noting example
首先通过catalog查询应该请求哪个节点
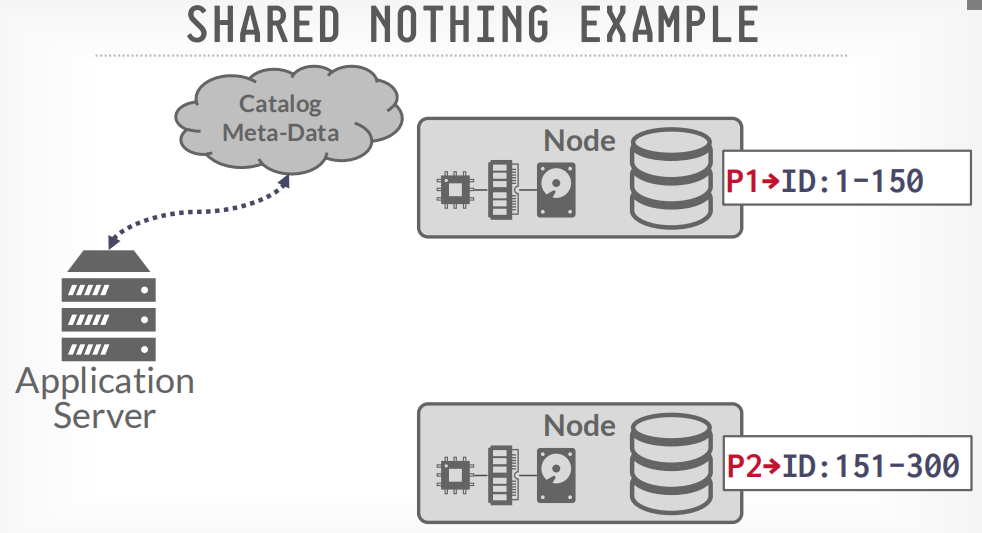
然后发送查询请求到相应的节点
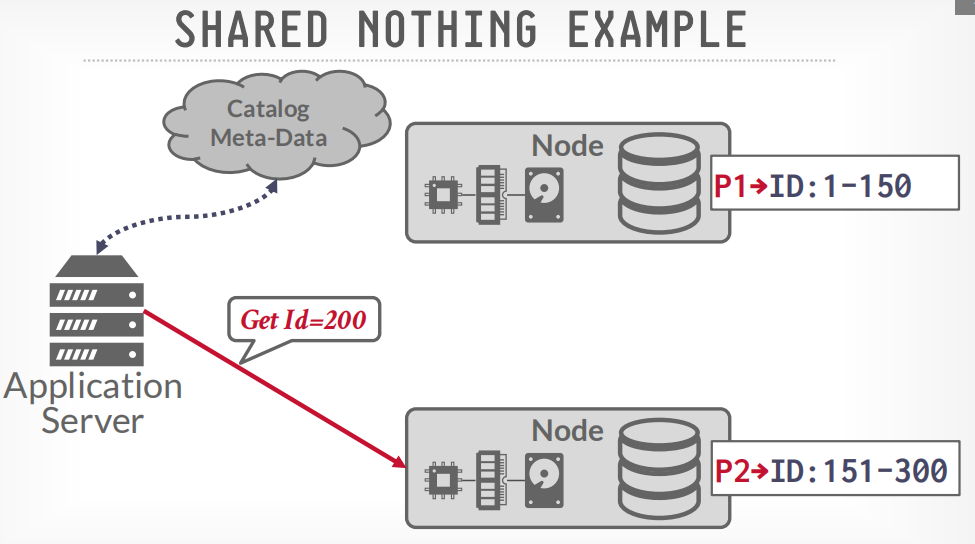
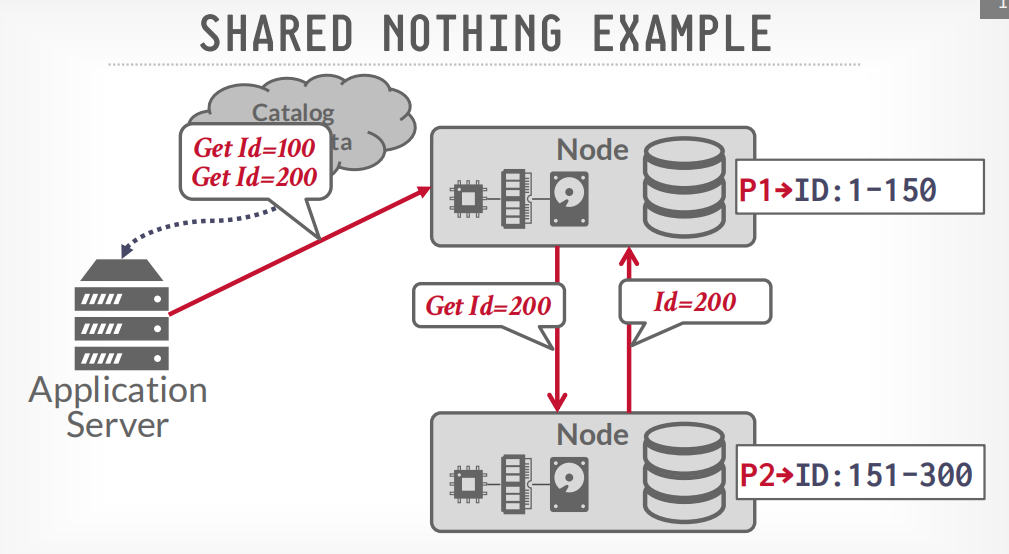
如果数据跨节点存储,那么数据会节点间通信,比如获取100和200的数据,node p1会请求p2获取200的数据,然后p1将两个数据返回给客户端
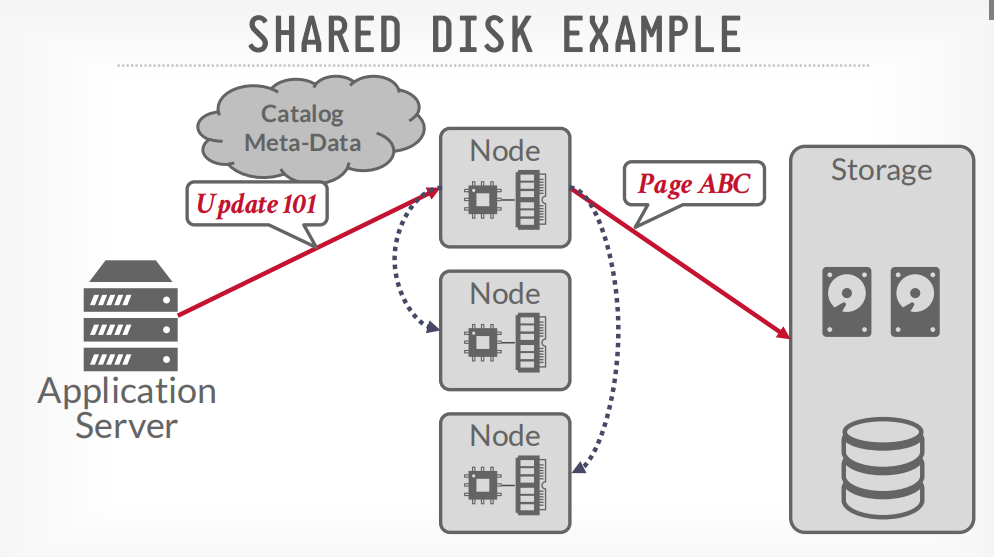
shared disk example
客户端请求节点获取数据,节点请求disk获取数据,然后返回
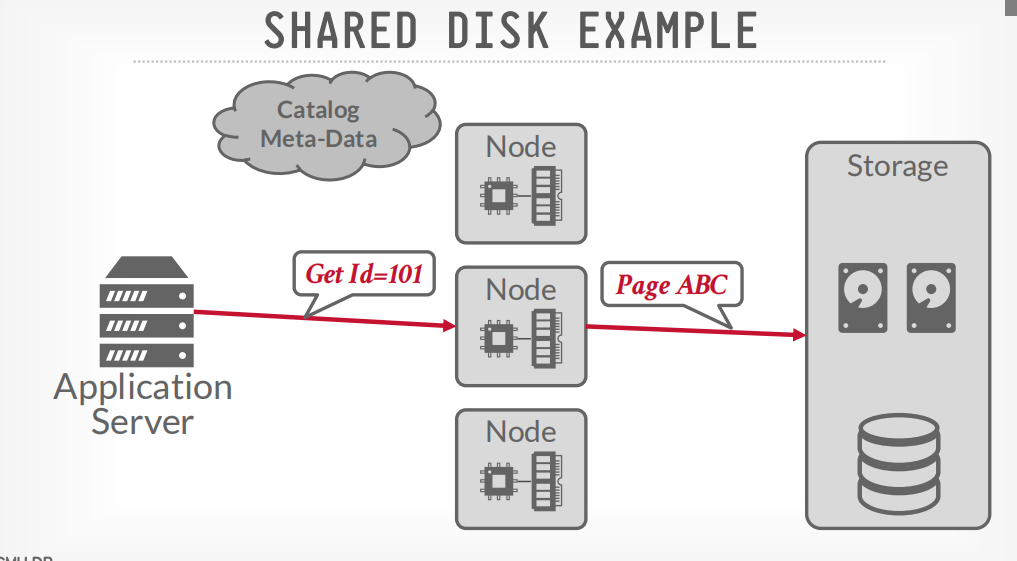
但是更新的时候需要广播给其他节点
mongo属于shared noting
- route节点,负责把请求路由到对应的节点上
- config节点,route从这里获取请求应该到哪个节点上
- db节点
数据拆分
- 将不同的数据放到每个shared上面
- 不同的查询交给不同的shared去做,可以通过exchange operate来并行执行。
- 最简单的方式是一个表一个分区,mongodb可以这样。
- 水平分区
- 将数据水平分到每个分区中
- 可以是hash,也可以是一个范围一个范围的分区
- hash的话,想增加分区很麻烦,可以使用
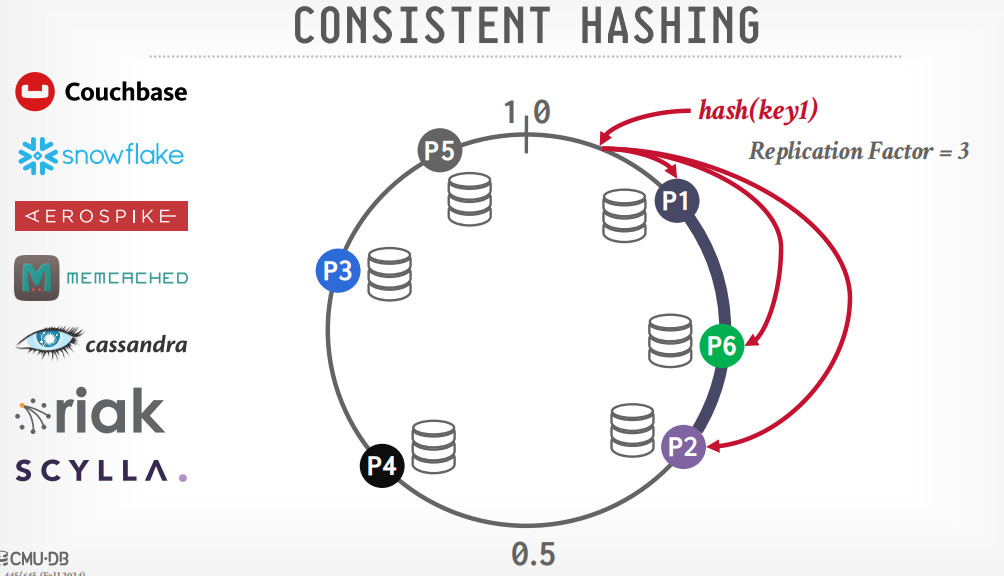
一致性hash来解决增加分区的问题,而不是取余。 - 采用一致性hash的有snowflake,memcached,cassandra等
SHARED-DISK PARTITIONING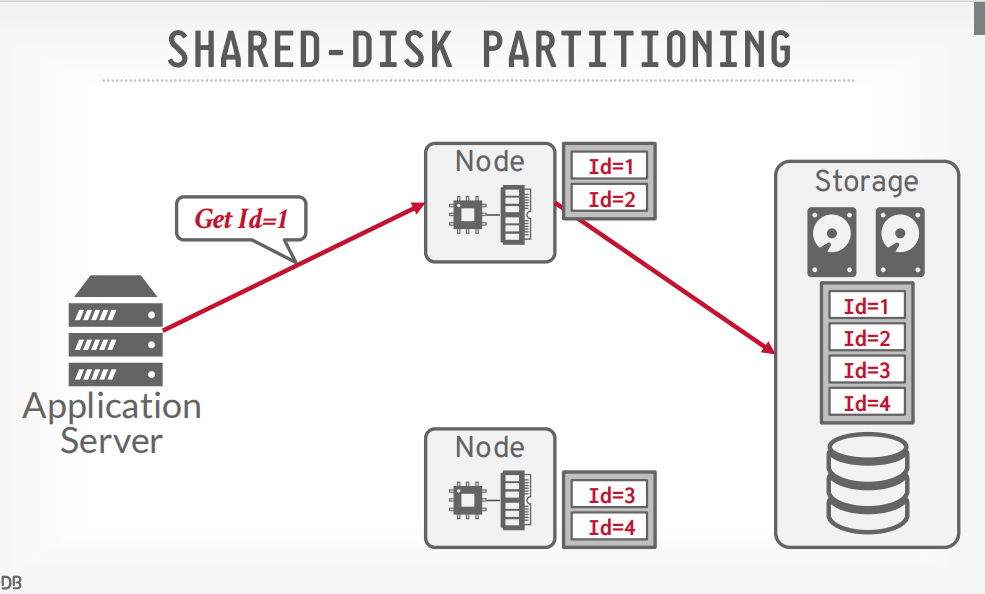
SHARED-NOTHING PARTITIONING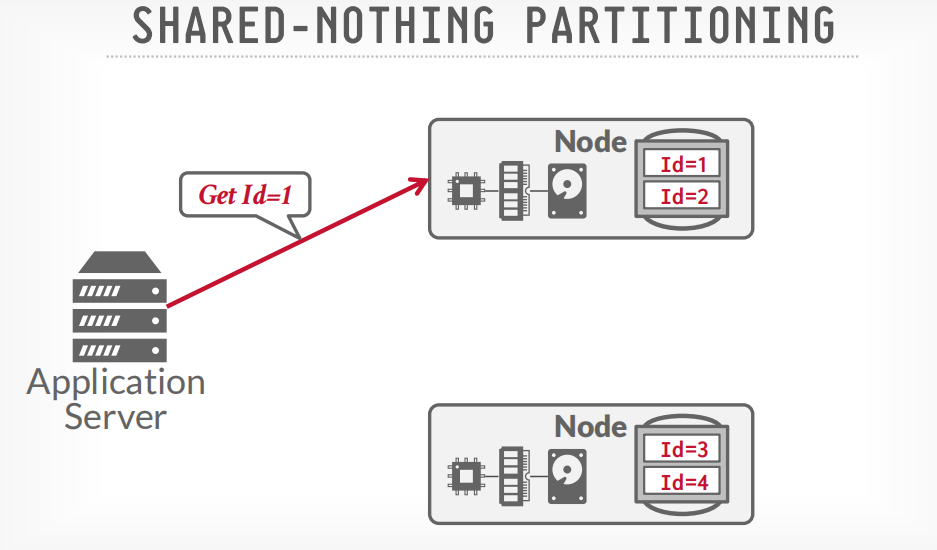
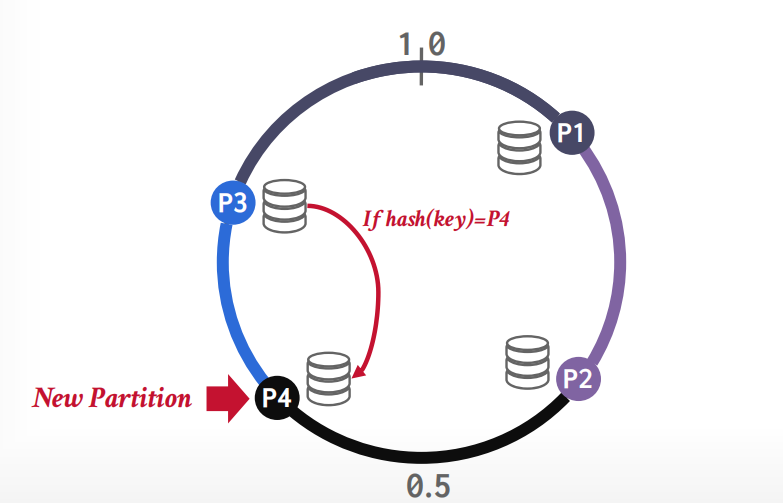
一致性hash
节点分布在环上,数据也分布在环上,顺时针旋转,数据就属于第一个到达的节点。
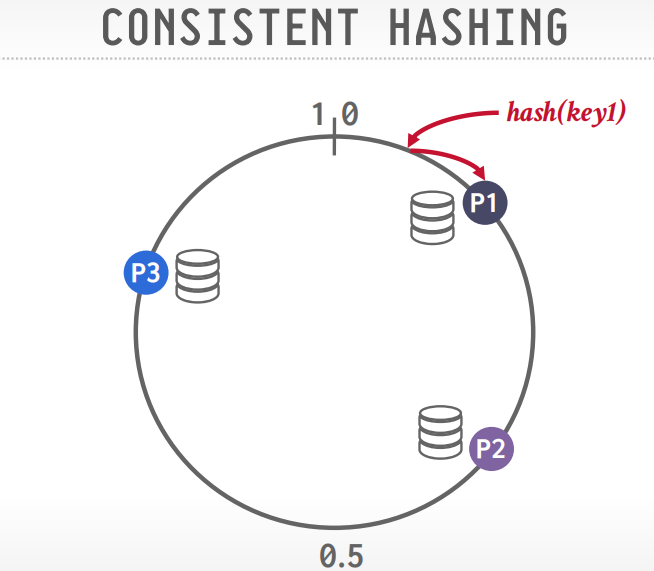
增加节点的时候,只需要重新hash其中一个节点的数据就可以,比如增加p4,因为P4节点落在p3节点的范围里面,所以只需要重新hash节点p3的数据,其他节点无影响。
如果需要复制数据,将数据存储在多个节点上,假设replication=3,复制数据到三个节点,则顺时针旋转的3个节点都存储该数据。
分布式事务
- 通过中心化服务器,来分发lock,然后提交事务的时候通过他来请求每一个分区是否能提交事务,如果都可以,才提交事务
- 去中心化事务提交
spanner
HNSW
分布式OLTP数据库
假设所有节点是友好的
replication:可以提高可用性
- 分区 vs 非分区
- shared noting vs shared disk
- 设计
- 副本配置
- 传播方案
- 传播时序
- 更新方法
副本配置
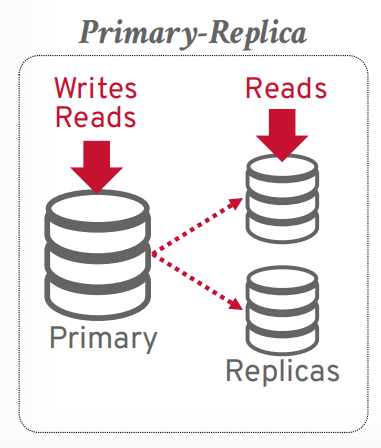
- primary: 有一个主节点,其他是从节点,大部分都是这样的,主节点负责同步给其他从节点。比如主从复制,读写分离这种
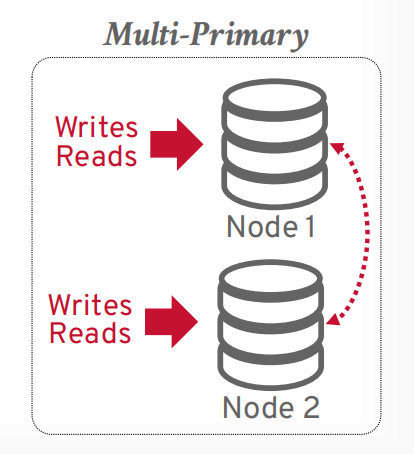
- multi-primary: 事务可以在任何一个节点提交,并同步给其他节点,mysql group replication就支持这个。这种方案所有副本都可以读写,冲突的时候通过两阶段提交或者Paxos来觉得写入哪个。Facebook使用了这个。
primary,写入主节点,读取可以在从节点
multi-primary 任何节点都可以读写
K-safety: 通过监控对象来看有哪些replica是活跃的。至少要有k个replica,如果小于k个,就认为宕机了。
传播方案
- 同步:强一致性,所有从节点都同步以后才返回成功
- 异步:最终一致性,先返回成功,在同步给其他的从节点
- 半同步:同步给一些节点后返回成功给客户端
传播时序
- 即时:立即传递给其他节点,同时当事务提交或回滚的时候也传递给其他节点
- 提交:事务提交的时候才传播给其他节点
事务提交的顺序由数据库状态决定,原子提交协议也是分布式的共识协议
原子提交协议
- 两阶段提交(1970)
- 三阶段提交(1983)
- Viewstamped Replication (1988)
- Paxos(1989)
- Raft(2013)
- ZAB(2008)
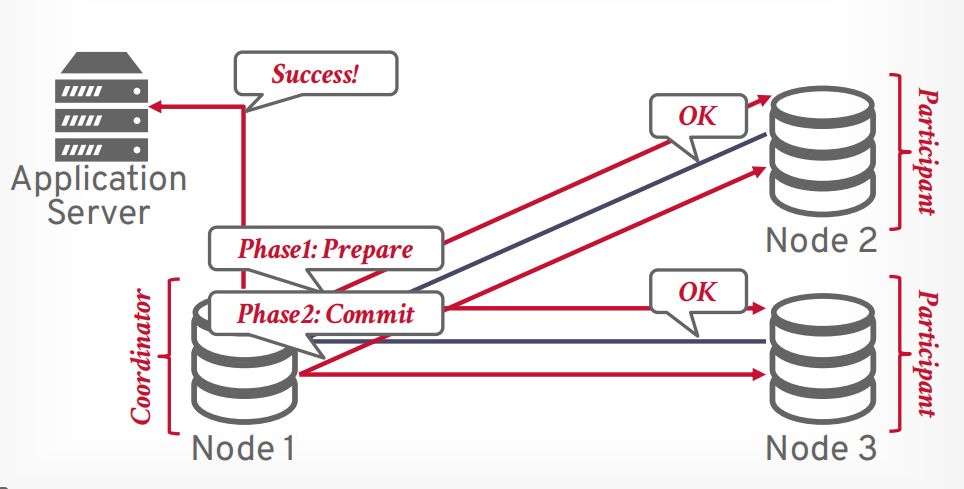
两阶段提交
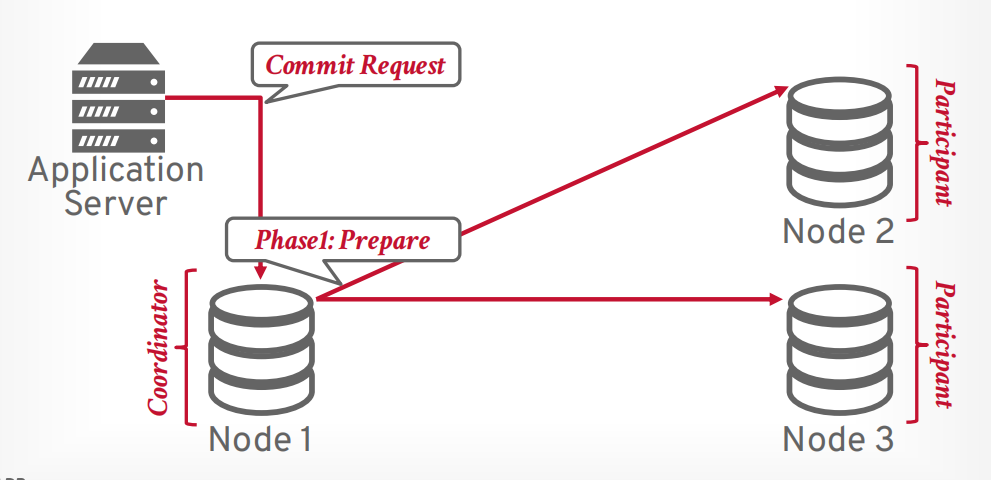
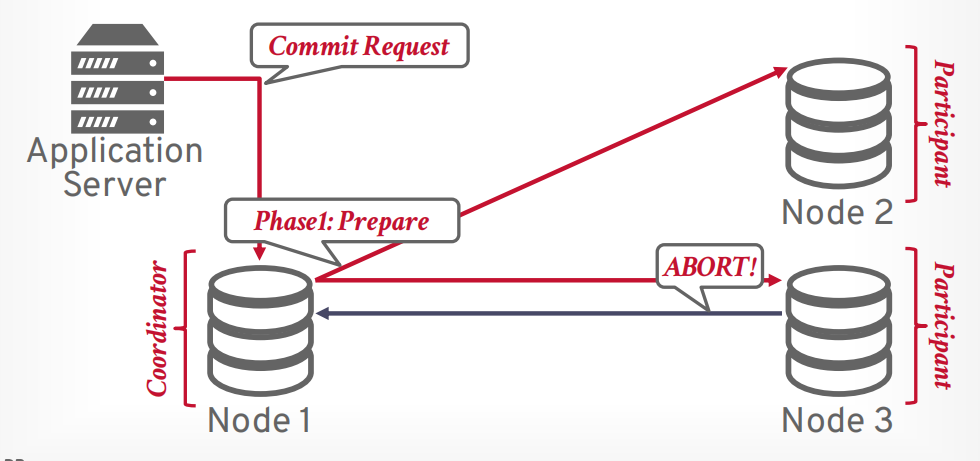
- 第一阶段 prepare, 像所有参与者发送请求,是否能提交事务,只有所有都可以提交,才进入第二阶段,如果有一个节点abort,那么事务就会进入第二阶段abort
- 第二阶段 commit, 想所有参与者发送请求,进行提交事务。
- 第二阶段 abort, 返回abort,然后所有参与者abort。
假设客户端发送提交事务的请求,有一个协调器和若干个参与者,协调器接收请求以后,向参与者发送第一阶段prepare请求。
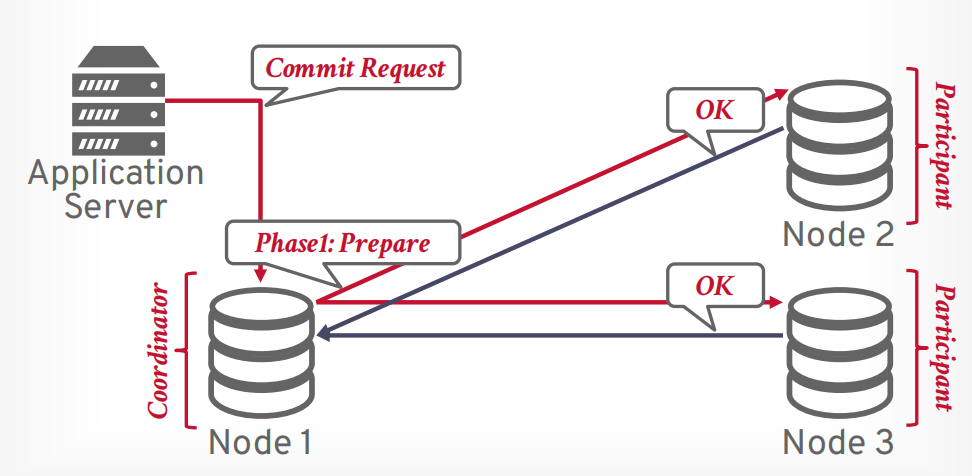
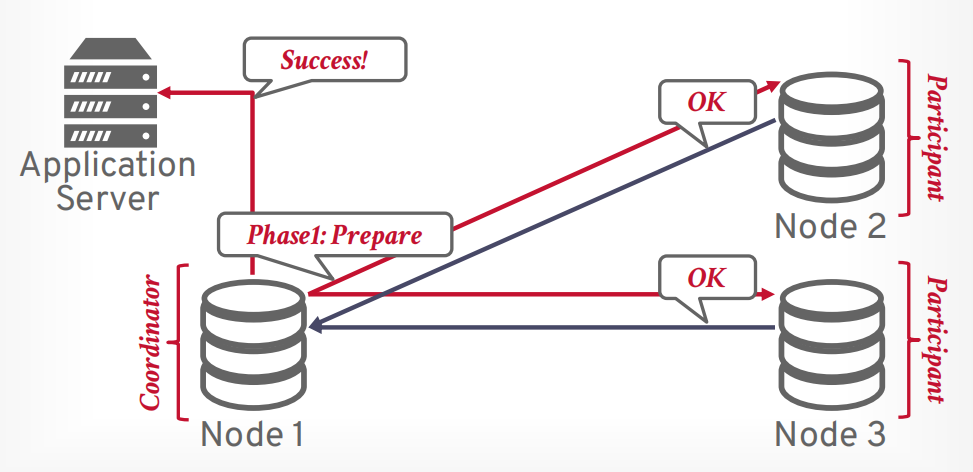
如果所有参与者返回OK,表示全部同意提交,则可以提交。
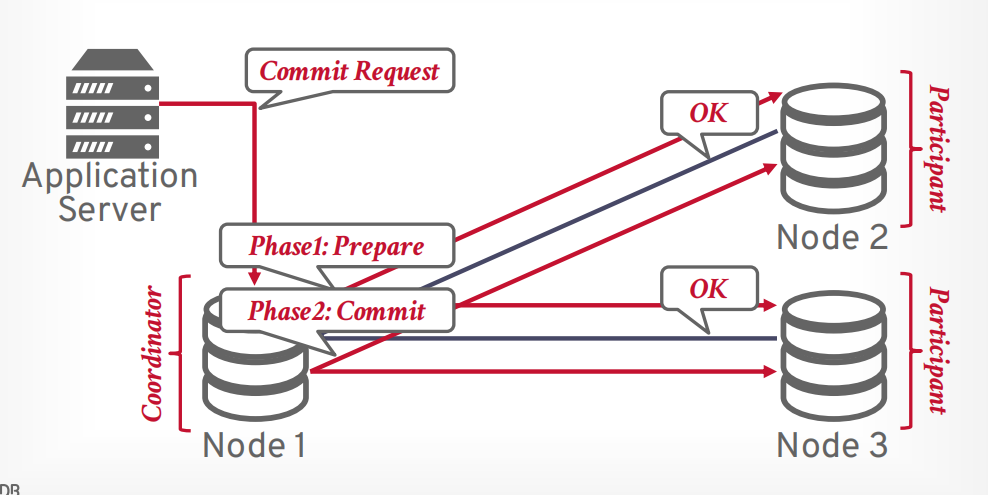
接下来协调器发送第二阶段commit请求给所有参与者
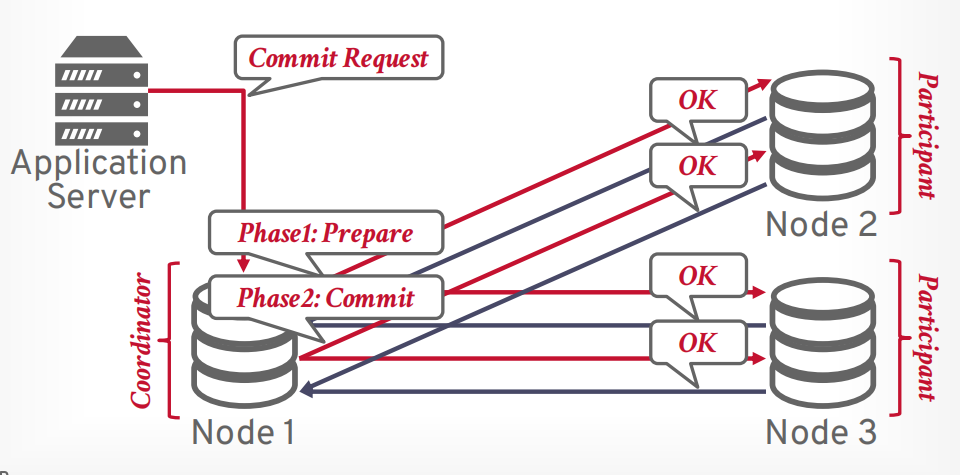
所有参与者返回OK以后,协调器返回提交成功给客户端
假设有任何一个参与者在第一阶段返回了不同意,则终止事务提交
协调器向所有节点发送第二阶段abort请求
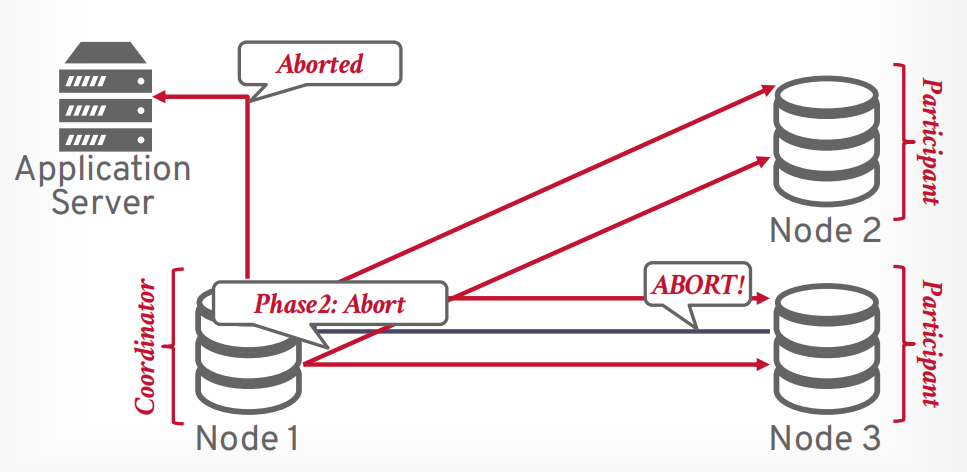
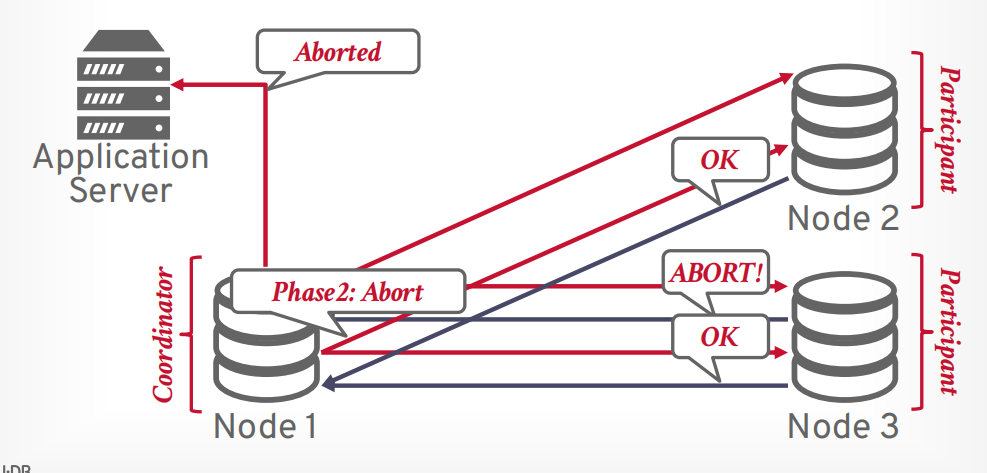
等待所有节点返回OK以后,协调器返回abort给客户端
崩溃恢复
- 如果协调器崩溃了。要么全部abort,要么选出新的协调器继续执行事务。
- 如果参与者崩溃了,那么协调器会认为参与者返回了abort,从而终止事务。
优化
- early prepare voting: 这个很少,最后一个查询执行的时候,告诉他可以直接进入prepare阶段
- early Ack After Prepare: 这个很常见,prepare阶段结束就返回事务执行成功,然后自己再接着commit。
early Ack After Prepare:当第一阶段prepare返回成功以后,立即给客户端返回成功。
返回给客户端以后再发送第二阶段commit请求给其他参与者。
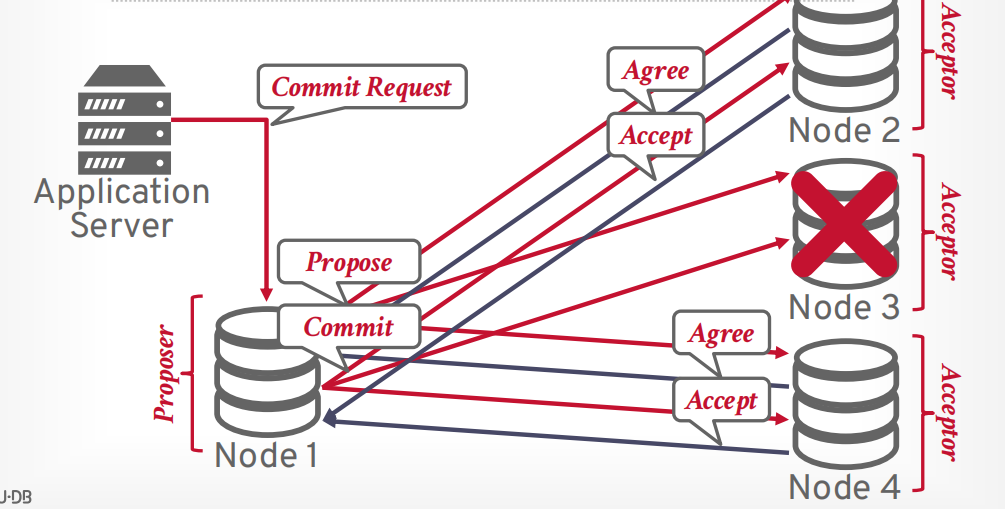
Paxos,来自分布式计算领域,也被称为共识协议。两阶段提交是Paxos的一个子集。
- Paxos大部分节点同意提交就可以提交,而两阶段提交需要所有参与者同意,所以Paxos没有容错。
multi-Paxos
- 选举一个leader来进行提案,每隔一段时间重新选举
- 防止有两个 proposer 来回提交导致的starving问题
两阶段提交 vs Paxos vs Raft
两阶段提交
- 如果协调器在发送prepare消息后挂掉,则阻塞直到协调器恢复
Paxos
- 如果大多数参与者活着则非阻塞,前提是有足够长的时间不再出现故障
Raft
- 与Paxos类似,但节点类型较少。
- 只有拥有最新日志的节点才能成为领导者
CAP理论
- Consistent: 一致性
- Always Available: 始终可用
- Network Partition Tolerant:分区容错性
Nosql基本都是AP,事务性的基本都是CP
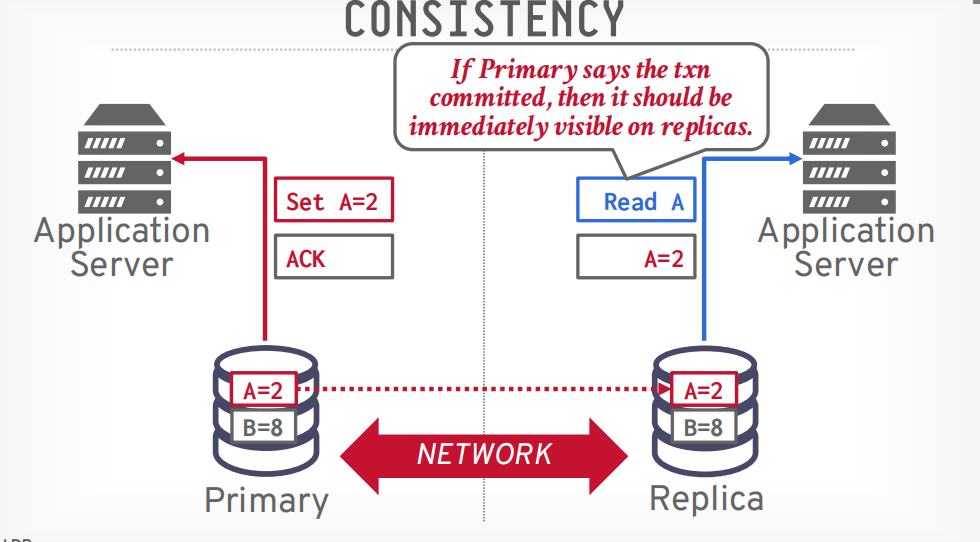
一致性代表从哪个节点获取的数据都是一样的
可用性代表当节点挂了以后系统还可以使用
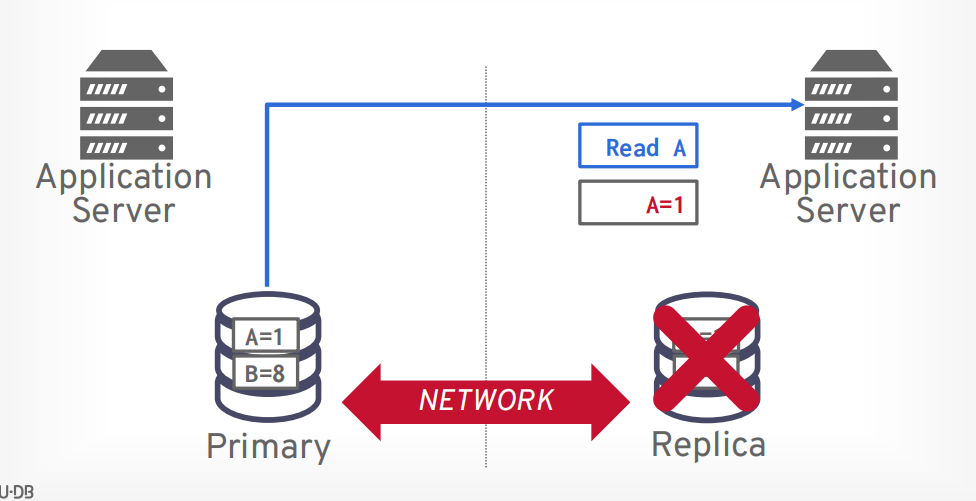
分区容错性最难,容易出现脑裂问题。当网络挂掉以后从节点以为主节点挂了,所以把自己选举为主节点,就产生了两个主节点
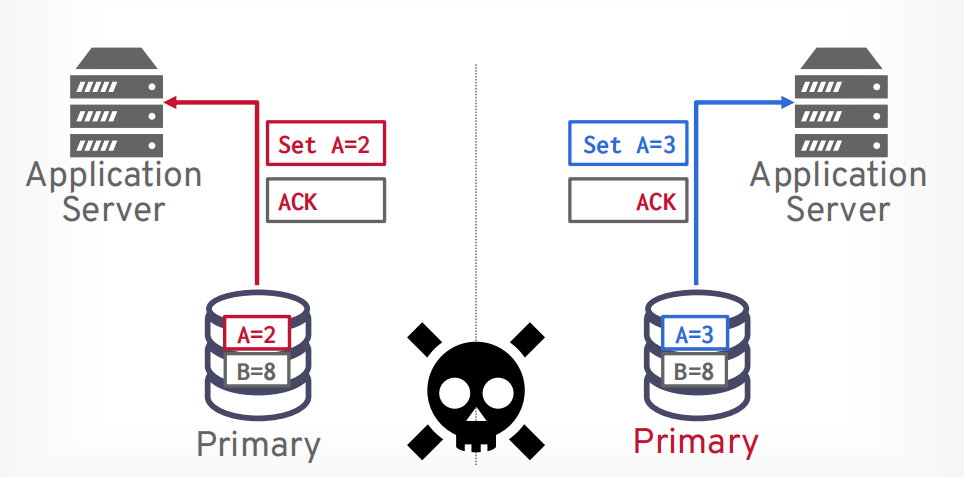
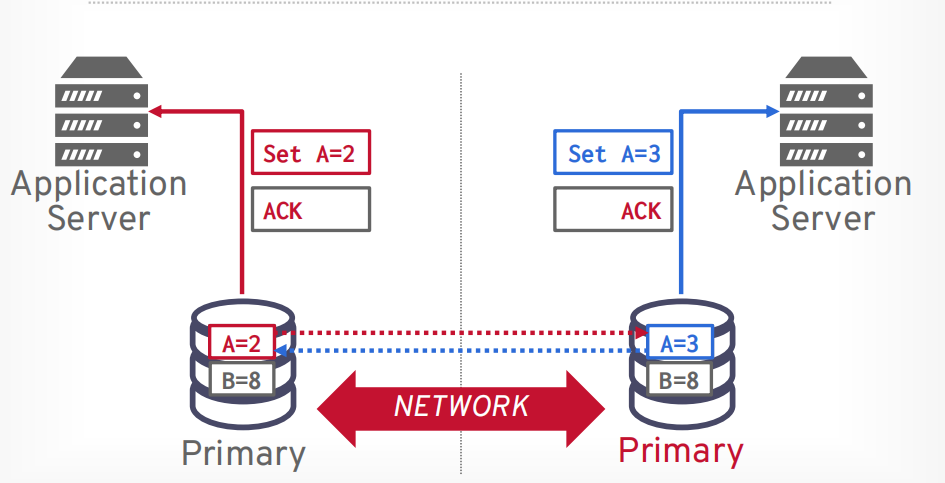
当网络恢复以后,两个节点的数据就不一样了。
解决方法1:停止系统
- 停止接受没有大多数节点的分区中的更新。
解决方案2:允许拆分,协调更改
- 允许分区的每一侧都接收更新
- 根据时间来确定最后的版本,以最后的版本为准
- 服务端:last update wins 用最后的版本为准
- 客户端:vector clocks(不要这么做)
2010年提议对CAP进行扩展
- Partition Tolerant:分区容忍
- Always Available:随时可用
- Consistent:一致
- Latency:延迟
- Consistency: 一致性
分布式OLAP数据库
OLAP数据库也被称作数据仓库,通过ETL,把数据存入数据仓库。
- Extract
- Transform
- Load
星形模型
- 一个事实表
- 几个dim表
雪花模型
- 一个事实表
- 更多的dim表,dim表可以有他的dim表
查询执行
- push: 发送查询到包含数据的节点,返回数据的时候会做过滤和处理,就像
条件下推那样 - pull: 知道需要的数据在哪些page里面,把page取过来在执行查询。
push
pull
查询计划
- 物理操作: 先生成查询计划,然后将对应的需要执行的物理操作直接发送给其余节点,其余节点只负责执行,返回数据。大部分分布式数据库都这样。
- sql: 将sql发给每个节点,每个节点生成自己的执行计划。然后执行返回。